搬运和安装 从断电停止时、输入停止信号到机器人停止前的时间及惯性移动角度
B-83644CM/06
工业 自动 化 专家 CAD2D3D.com
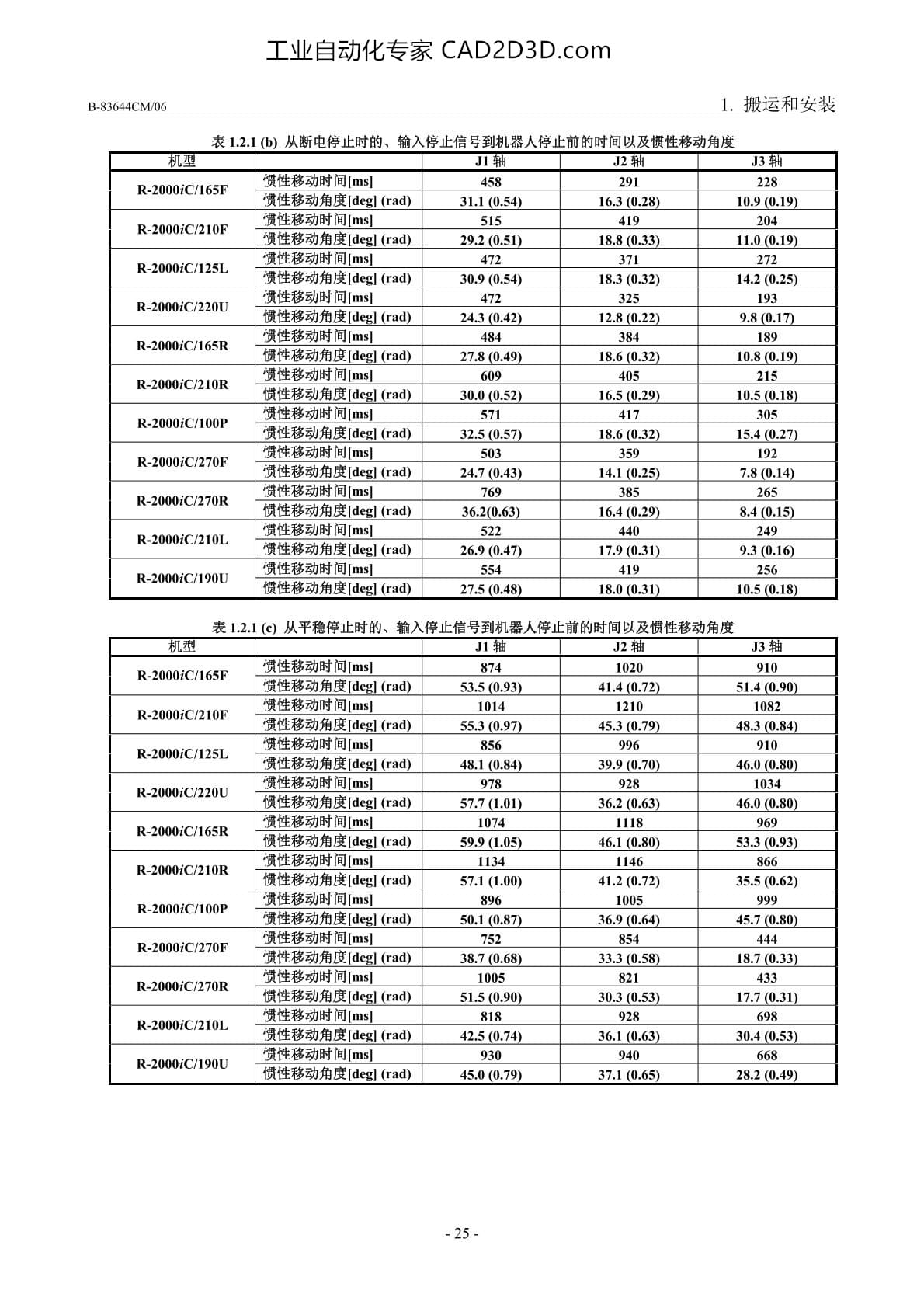
R 1.2.1 (b) 从 断 电 停止 时 的 、 输 入 停止 信号 到 机 器 人 停止 前 的 时 间 以
T
及 惯性 移动 角度
228
RARCHeE gfizgzg::& (rad) 31.: 而 有 人 10.9 (0.19) |
| R-2000iC210F ;gggz;:r& (rad) zq.z5 :5.51) 1&: :1:33) lmz ‘(]4119) |
R-2000iC/125L ggg;z;::&” (rad) 30.94 Z:.su 1&33 332) 1412 Z;JS)
Re2000iC12200 民有 (rad) 5 而 二 参 别
5 全 和 动 度 ed (rad) 而 全 7 1
R2000iC210R gigggg:sgl (rad) 30.06 23.51) 16.54 襄 4 而
R-2000C/100P gggggg::&ll (rad) 31.55 (7(:.57) 13.54 人 人
R2000/C2708 Efiggggm (rad) 14.75 全 1 ET
和 全 (rad) Sfi.zfli63) 人 ET
R-2000{C/210L gggggg:fll (rad) 型 而 诚 4 下
R-2000iC/190U Eggggg:fll (rad) 站 二
表 1.2.1(e) 从 平稳 停止 时 的 、 输 入 停止 信号 到 机 器 人 停止 前 的 时 间 以 及 惯性 移动 角度
了 CA 训 计 到 区 (rad) 53.: Z;.m 41.:0(;‘.)72) 51 .: (13.90)
s
R2000iC210F 人 (rad) 二 本 1
和 乓 全 必 人 (rad) «uz.lfl (而 5 0 5 遇 辣
| 了 000C2200 全 和 动 度 dl (rad) 57.79 全 .01) 有 虽 画 ET |
| RI2000CA6R ggg?fizg:;z (rad) 59.‘90(?05) 4@:‘(::&0) 5339 f:m) I
RE2000{G2L0R ;gggz;:sfll (rad) Sn oo 本 大
2 四 (rad) 50. 1H ?:.37) ET ET 0
2 可 人 (rad) 5 (0 商 人 (
0 ET (rad) 51 .Iso(‘zfyo) :41).3X :;453) 17.74 Z;.sl)
R-2000iC/210L ET (rad) 和 人 36. 二 5 0
R-2000iC/190U gzggzg::‘% (rad) 人 37. 0 2 人
o,
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)