3 维广域传感器斑点群检出工具
工业 自动 化 专家 CAD2D3D.com
B-§3304CM04 7. 命 令 行 工具
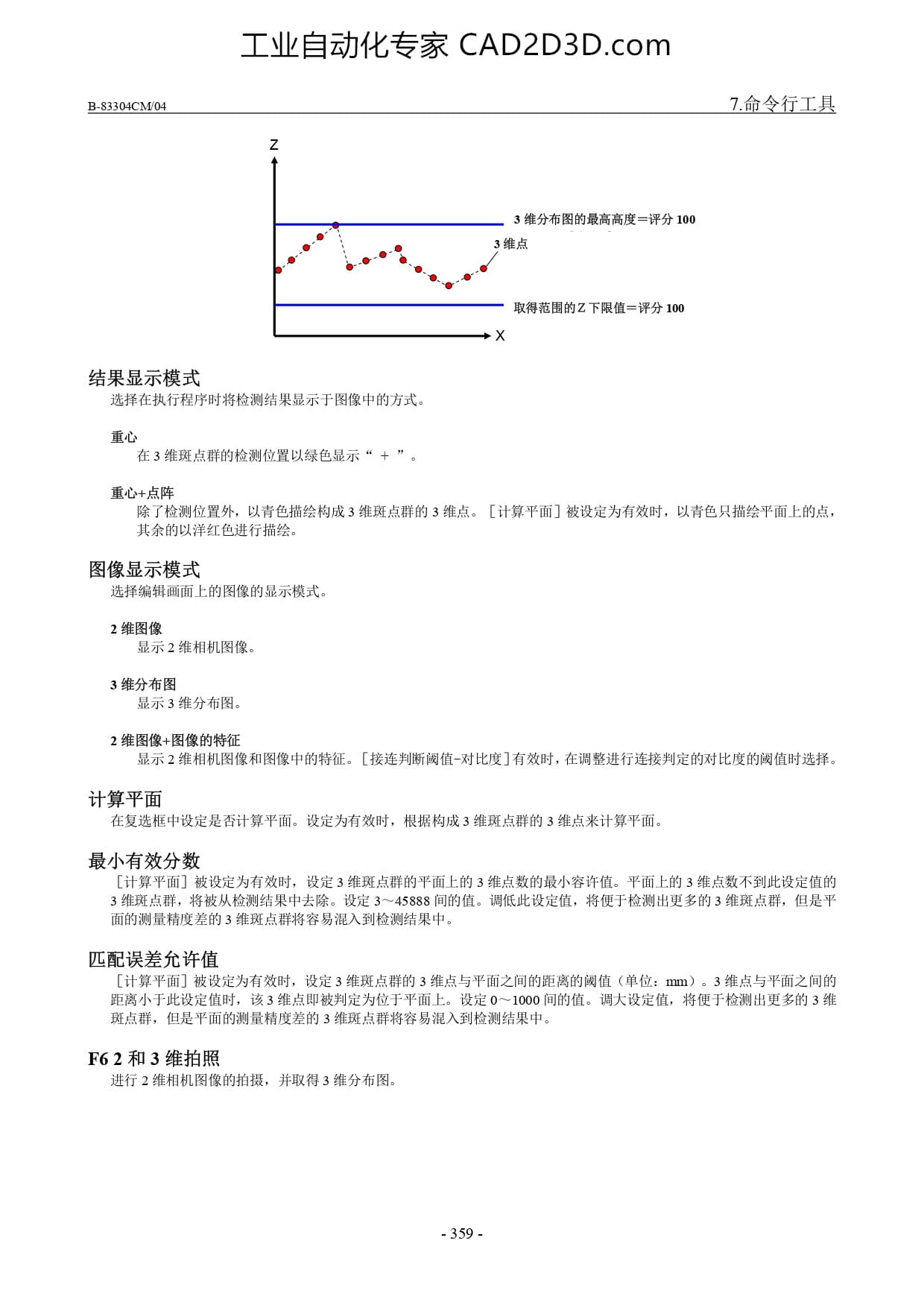
3 维 分 布 图 的 最 高 高 度 一 评分 100
取得 范围 的 Z 下限 值 = 评 分 100
结果 显示 模式
选择 在 执行 程序 时 将 检测 结果 显示 于 图 像 中 的 方式 。
重心
在 3 维 斑点 群 的 检测 位 置 以 绿色 显示 “ + ”。
重心 + 点 阵
除了 检测 位 置 外 , 以 青色 描绘 构成 3 维 斑点 群 的 3 维 点 。 [计算 平面 ] 被 设 定 为 有 效 时 , 以 青色 只 描绘 平面 上 的 点 ,
其 余 的 以 洋红 色 进 行 描绘
图 像 显 示 模 式
选择 编辑 画面 上 的 图 像 的 显示 模式 。
2 维 图 像
显示 2 维 相机 图 像 。
3 维 分 布 图
显示 3 维 分 布 图 。
2 维 图 像 + 图 像 的 特征
示 2 维 相机 图 像 和 图 像 中 的 特征 。[ 接 连 判断 阅 值 -对比 度 ] 有 效 时 , 在 调整 进行 连接 判定 的 对 比 度 的 阔 值 时 选择 。
计算 平面
在 复 选 框 中 设 定 是 可 计算 平面 。 设 定 为 有 效 时 , 根 据 构成 3 GEBEARENY 3 e kTS
最 小 有 效 分 数
[计算 平面 ] 被 设 定 为 有 效 时 , 设 定 3 维
3 维 天 点 群 , 将 被 从 检测 结果 中 去 除 。 设 定 "
面 的 测量 精度 差 的 3 HERE AR 28 S A B S
匹配 误差 允许 值
[计算 平面] 被 设 定 为 有 效 时 , 设 定
BN T IR
FEAT, TR A0 3 4
F6 2 和 3 维 拍照
进行 2 维 相机 图 像 的 拍摄 , 并 取得 3 维 分 布 图 。
不 到 此 设 定 值 的
和 3 维 斑点 群 , 但 是 平
班 上 的 3 维 点 数 的 最 小 容许 值 。 平 面 上 的 3
。 调 低 此 设 定 值 , 将 便于 检测
。3 维 点 与 平面 之 间 的
。 调 大 设 定 从 将 便于 检测 出 更 多 的 3 维
-359 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)