J1轴可动范围 J2轴可动范围
<
工业 自动 化 专家 CAD2D3D.com
B-83754CM/03 3. 基本 规格
* 170°
o o
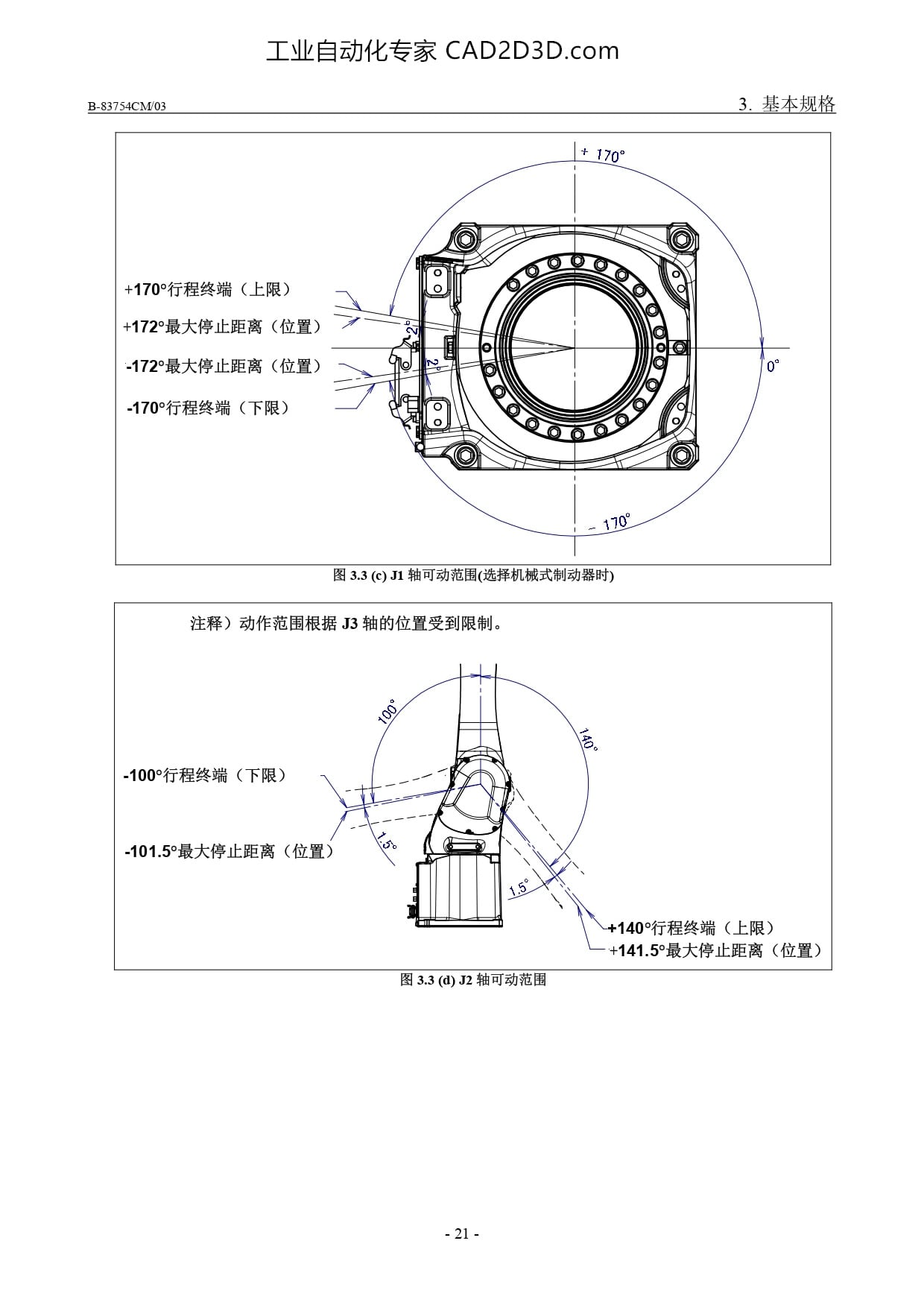
+170" 行 程 终端 (上 限 )
+172" 最 大 停止 距离 〈 位 置 ) 之 一 到 |
-172* 最 大 停止 距离 位 置 ) 一 、 =
-170" 行 程 终端 《下 限 )
oo|
图 3.3 (c) 联 轴 可 动 范围 (选择 机 械 式 制动器 时 )
注释 ) 动作 范围 根据 到 轴 的 位 置 受到 限
& _
.
-100。 行 程 终端 〈( 下 限 ) e
_ 刀 -一 N
L= 人、
2 2 N
-101.5* 最 大 停止 距离 〈 位 置 ) S N
N 、、
N
站 140* 行 程 终端 上限?
+141.5" 最 大 停止 距离 〈 位 置 )
图 3.3 (d) 也 轴 可 动 范围
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)