常见问题处理方法
B-82274CM/12
业 自 动 化 专家 CAD2D3D.com
9. 常见 问题 处 理 方法
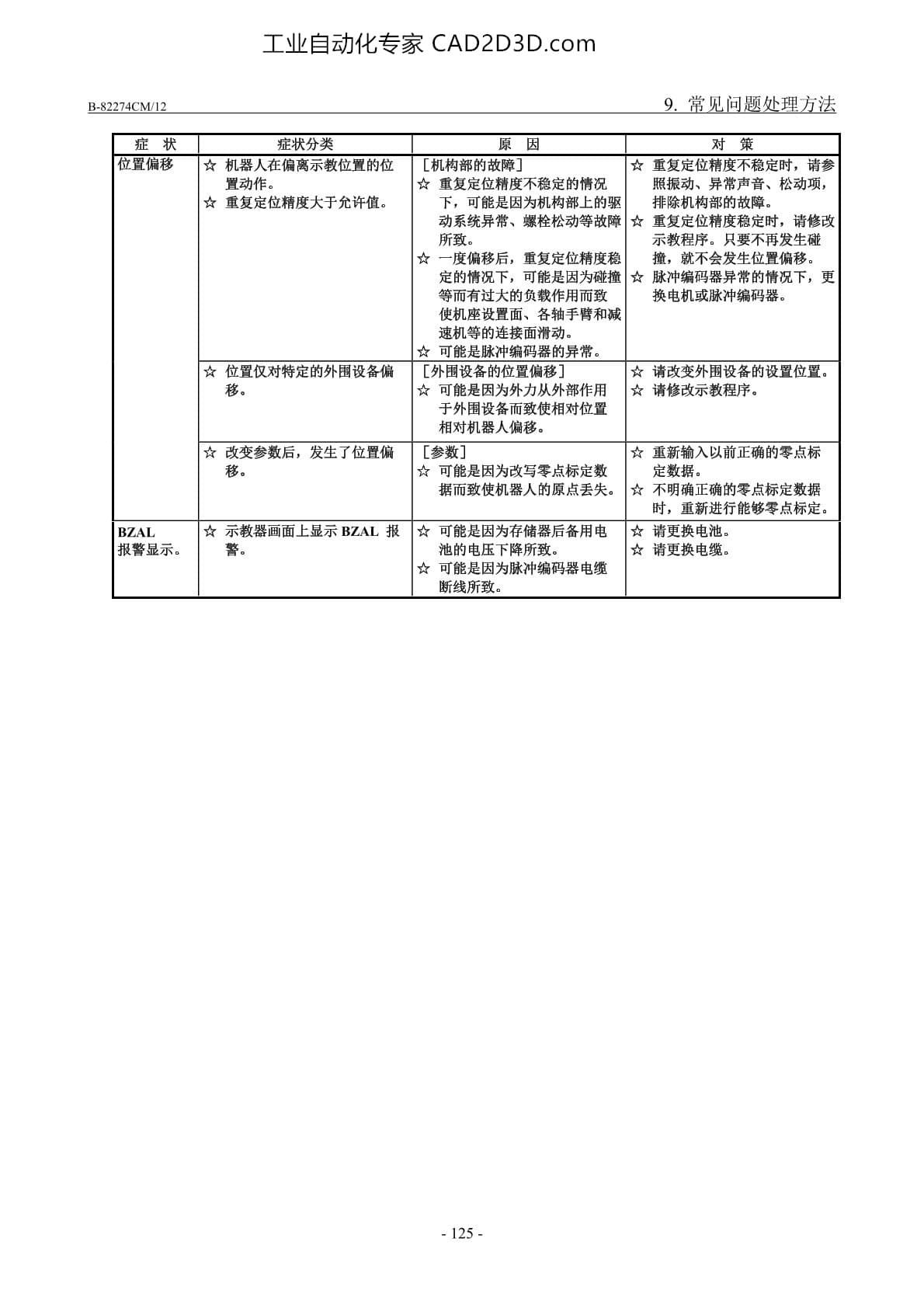
位 置 偏 移 | 女 机 器 人 在 偏离 示 教 位 置 的 位 ”| [机 构 部 的 故障 ] 女 重复 定位 精度 不 稳定 时 , 请 参
置 动作 。 Yo 重复 定位 精度 不 稳定 的 情况 照 振 动 、 异 常 声音 、 松 动 项 ,
妇 重复 定位 精度 大 于 允许 值 。 下 , 可 能 是 因为 机 构 部 上 的 驱 | 。” 排除 机 构 部 的 故障 。
动 系统 异常 、 螺 栓 松动 等 故障 | 六 重复 定位 精度 稳定 时 , 请 修改
所 致 。 示 教 程序 。 只 要 不 再 发 生 碰
K 一 度 偏 移 后 , 重 复 定 位 精度 稳 | 。 撞 , 就 不 会 发 生 位 置 偏 移 。
定 的 情况 下 , 可 能 是 因为 碰撞 | 六 脉冲 编码 器 异常 的 情况 下 , 更
等 而 有 过 大 的 负载 作用 而 致 换 电机 或 脉冲 编码 器 。
使 机 座 设置 面 、 各 轴 手 璧 和 减
速 机 等 的 连接 面 滑动 。
妇 可 能 是 脉冲 编码 器 的 异常 。
交 位 置 仅 对 特定 的 外 围 设备 偏 “| [外 围 设备 的 位 置 偏 移 ] 六 请 改变 外 围 设备 的 设置 位 置 。
®. 六 可 能 是 因为 外 力 从 外 部 作用 “| 冯 请 修改 示 教 程序 。
于 外 围 设备 而 致使 相对 位 置
相对 机 器 人 偏 移 。
克 改变 参数 后 , 发 生 了 位 置 偏 | [参数 ] 哀 重新 输入 以 前 正确 的 零点 标
移 。 认 可 能 是 因为 改写 零点 标定 数 定数 据 。
据 而 致使 机 器 人 的 原点 丢失 。| 六 不 明确 正确 的 零点 标定 数据
时 , 重 新 进行 能 够 零点 标定 。
BZAL 认 示 教 器 画面 上 显示 BZAL 报 | 交 可 能 是 因为 存储 器 后 备用 电 。 | 冯 请 更 换 电池 。
报警 显示 。 . 池 的 电压 下 降 所 致 六 请 更 换 电缆 。
交 可 能 是 因为 脉冲 编码 器 电 绚
断 线 所 致 。
-125 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)