3 维广域传感器斑点群检出工具
工业 自动 化 专家 CAD2D3D.com
7. 命 令 行 工 具 B-83304CM/04
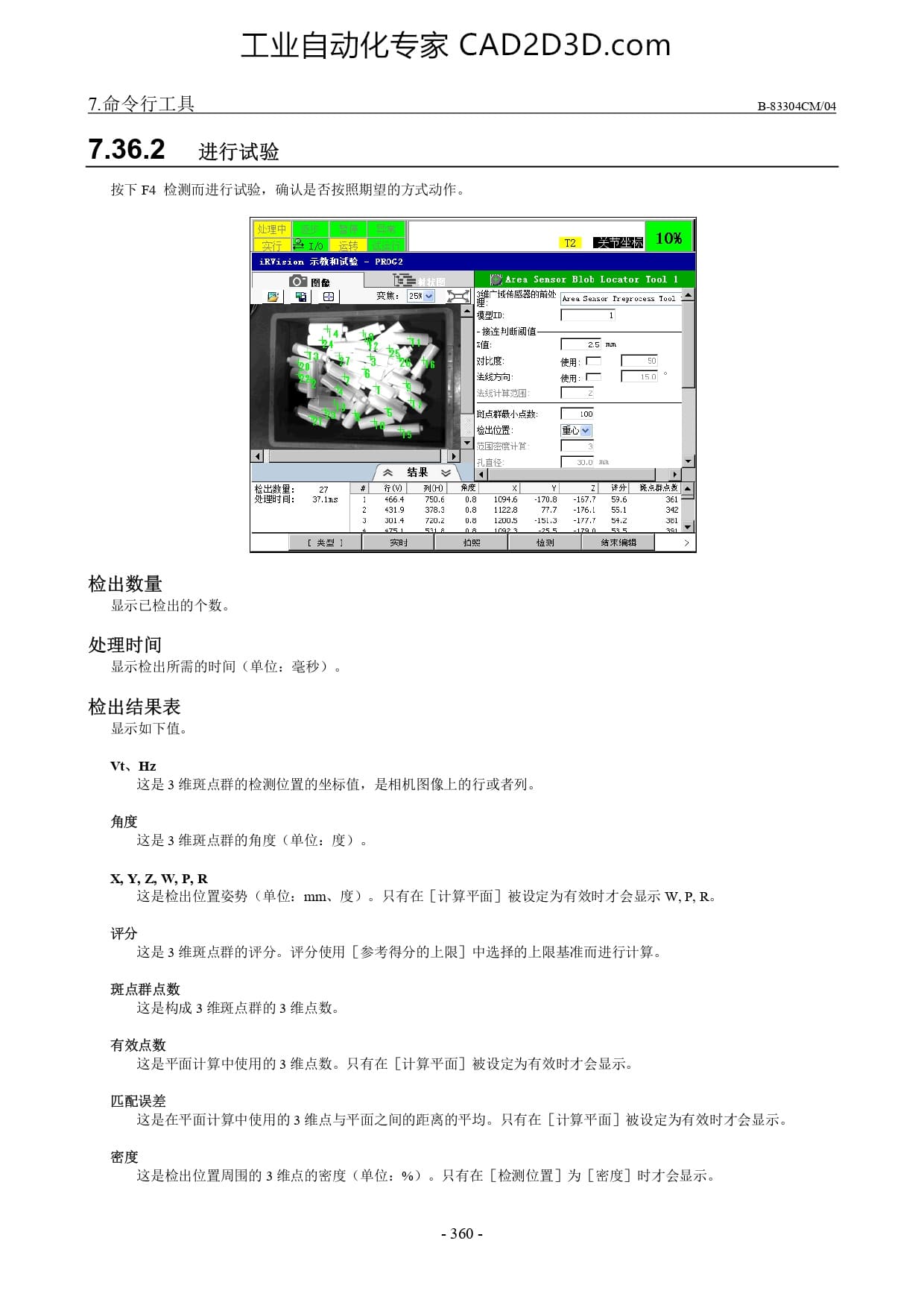
7.36.2 ”进行 试验
按 下 F4 检测 而 进行 :
&
=
s
各
Y
=
g
e
=
过
=
&
=
e m
ARm:
- i HIA B
利 28
e
’
RS ]
痊 出 数 里 : 27 IO )
处 理 时 间 : 。 artms 1 4664 706 08 1946 1708 1577 596 361 一
2 4319 eI 08 1l228 777 -1764 5541 32
3 3a0l4 7202 08 1z2n05 -1543 -1777 sh2 =
>
SR
[类 型 1
检 出 数量
显示 已 检 出 的 个 数 。
处 理 时 间
从 出 所 需 的 时 间 〈 单 位 : 毫秒 ) 。
显示
检 出 结果 表
显示 如 下 值 。
Vt. Hz
这 是 3 维 斑点 群 的 检测 位 置 的 坐标 值 , 是 相机 图 像 上 的 行 或 者 列 。
角度
这 是 3 维 斑点 群 的 角度 〈 单 位 : 度 ) 。
XY, ZW,P,R
这 是 检 出 位 置 姿势 〈 单 位 : mm、 度 ) 。 只 有 在 【计算 平面 ] 被 设 定 为 有 效 时 才 会 显示 W,P, 了 R。
评分
这 是 3 维 斑点 群 的 评分 。 评 分 使 用 [参考 得 分 的 上 限 ] 中 选择 的 上 限 基准 而 进行 计算 。
这 是 构成 3 维 斑点 群 的 3 维 点 数 。
有 效 点 数
这 是 平面 计算 中 使 用 的 3 维 点 数 。 只 有 在 【计算 平面 ] 被 设 定 为 有 效 时 才 会 显示 。
匹配 误差
这 是 在 平面 计算 中 使 用 的 3 维 点 与 平面 之 间 的 距离 的 平均 。 只 有 在 【计算 平面 ] 被 设 定 为 有 效 时 才 会 显示 。
密度
这 是 检 出 位 置 周围 的 3 维 点 的 密度 〈 单 位 : %) 。 只 有 在 [检测 位 置 ] 为 [密度 ] 时 才 会 显示 。
-360 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)