手腕负载条件 手腕部允许负载线图 (M-20iB/25)
工业 自动 化 专家 CAD2D3D.com
B-83754CM/03 3. 基本 规格
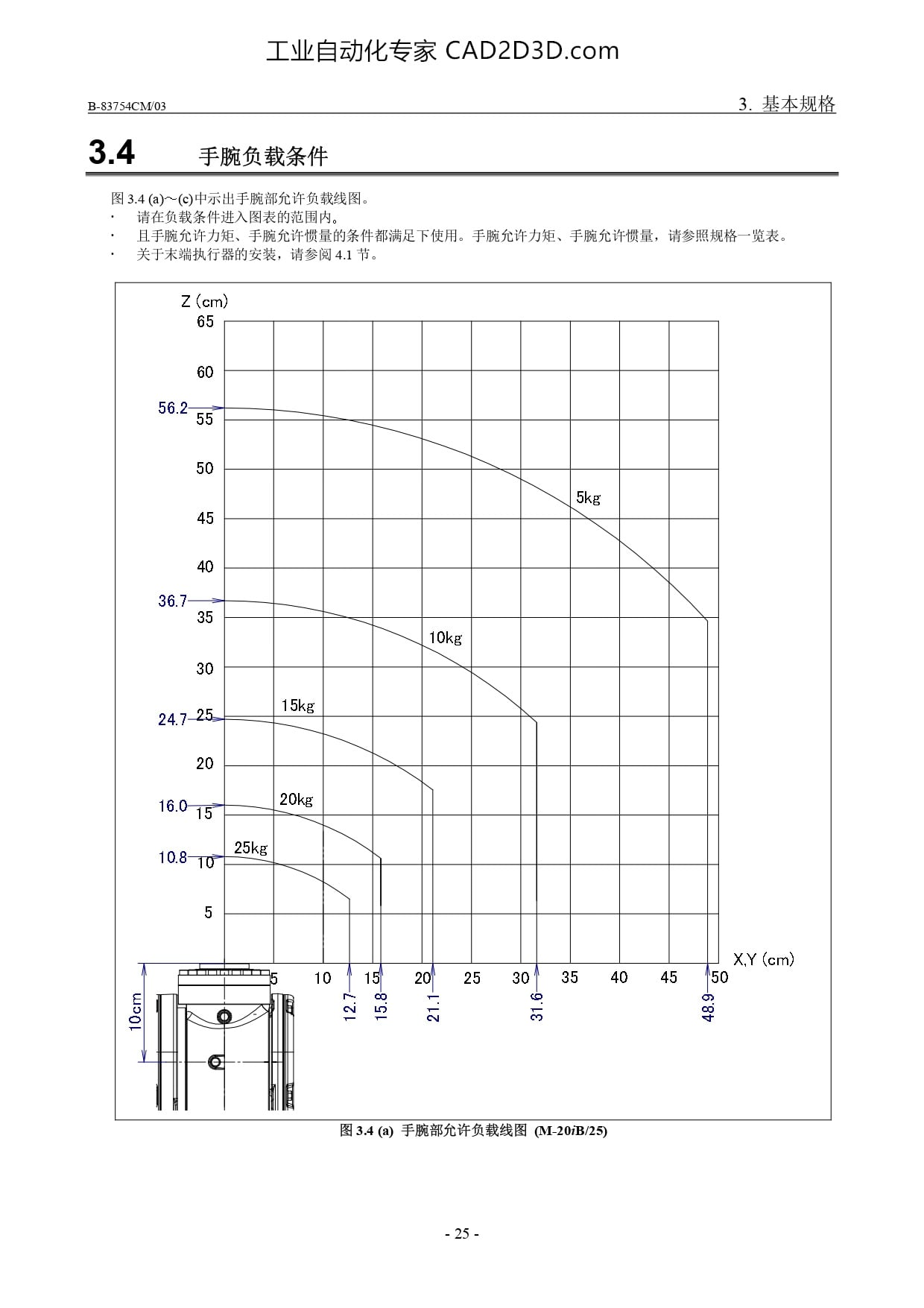
3.4 手腕 负载 条 件
图 3.4 (a)~(©) 477t F i
T E SR AR P 2
且 手 腕 允许 力矩 、 量 的 条 件 都 满足 下 使 用 。 手 腕 允许 力矩 、 手 腕 允许 惯量 , 请 参照 规格 一 览 表 。
关于 末端 执行 器 的 安装 , 请 参阅 4.1 节 。
Z (cm)
65
60
56.2
55
50
5kg
45
40
36.7 一 |
35
10kg
30
15k
24.7-25—€
20
16,05 —— 20k
25kg
10871
XY (cm)
10 1
10cm
127
15.8-<%-
211
31.6
48.9
图 3.4 (a) 手腕 部 允许 负载 线 图 CMC20iB/25)
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)