末端执行器的安全
业 自 动 化 专家 CAD2D3D.com
B-82274CM/12 安全 使 用 须知
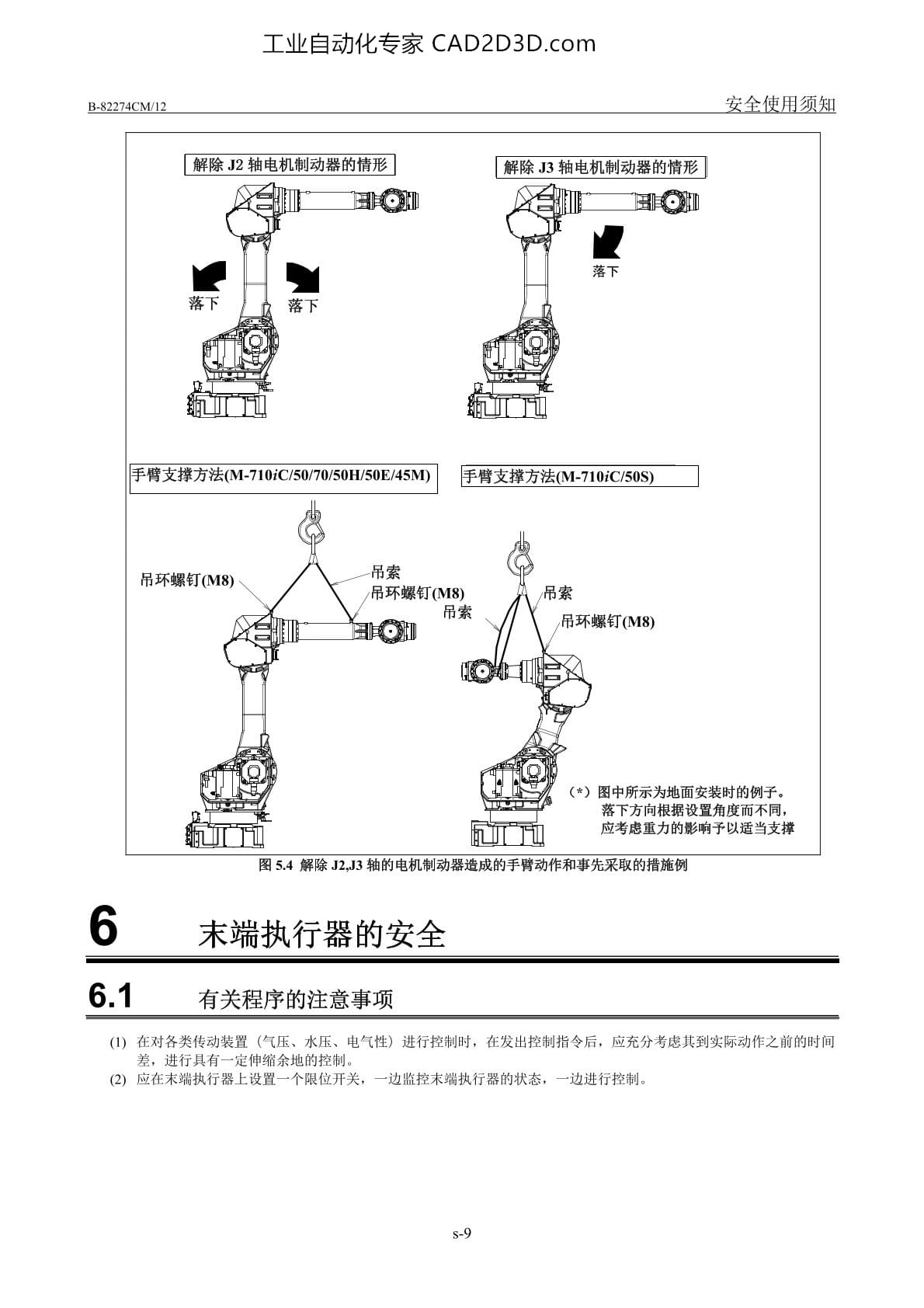
解除 J2 轴 电 机 制动器 的 情形 解除 J3 轴 电 机 制动器 的 情形
症 臂 支撑 方法 (M-710iC/50/70/50H/SOE/4SM) | ”证 臂 支撑 方法 (M-710iC/S0S)
8
吊环 螺钉 (MS)
吊
R
刷 环 螺钉 (M8)
/
《*) 图 中 所 示 为 地 面 安装 时 的 例子 。
落下 方向 根据 设置 角度 而 不 同 ,
应 考虑 重力 的 影响 予以 适当 支撑
5.4 解除 J2.J3 轴 的 电机 制动器 造成 的 手臂 动作 和 事先 采取 的 措施 例
6 未 端 执行 器 的 安全
6.1 有 关 程 序 的 注意 事项
(1) 在 对 各 类 传动 装置 (气压 、 水 压 、 电 气 性 ) 进行 控制 时 , 在 发 出 控制 指令 后 , 应 充分 考虑 其
差 , 进 行 具有 一 定 伸缩 余地 的
C) 应 在 末端 执行 器 上 设置 一 个 限 位 :
和 奈 动作 之 前 的 时 间
, 一 边 监 控
行 器 的 状态 , 一 边 进行 控制 。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)