调整限位开关
B-8227.
工业 自动 化 专家 CAD2D3D.com
4CM/12 6. 变更 可 动 范
6.4 调整 限 位 开关
在
调节
1
变更 基于 限 位 开关 的 动作 范围 时 , 务 须 对 限 位 开关 进行 调整 。
步骤
将 系统 变量 SMOR_GRP.$CAL_DONE 设 定 为 FALSE。 由 此 , 解 除 基于 软件 的 对 行程 终端 的 限制 , 从 而 可 以 在 JOG
进 给 下 跨越 行
松 开 固定 着 极限
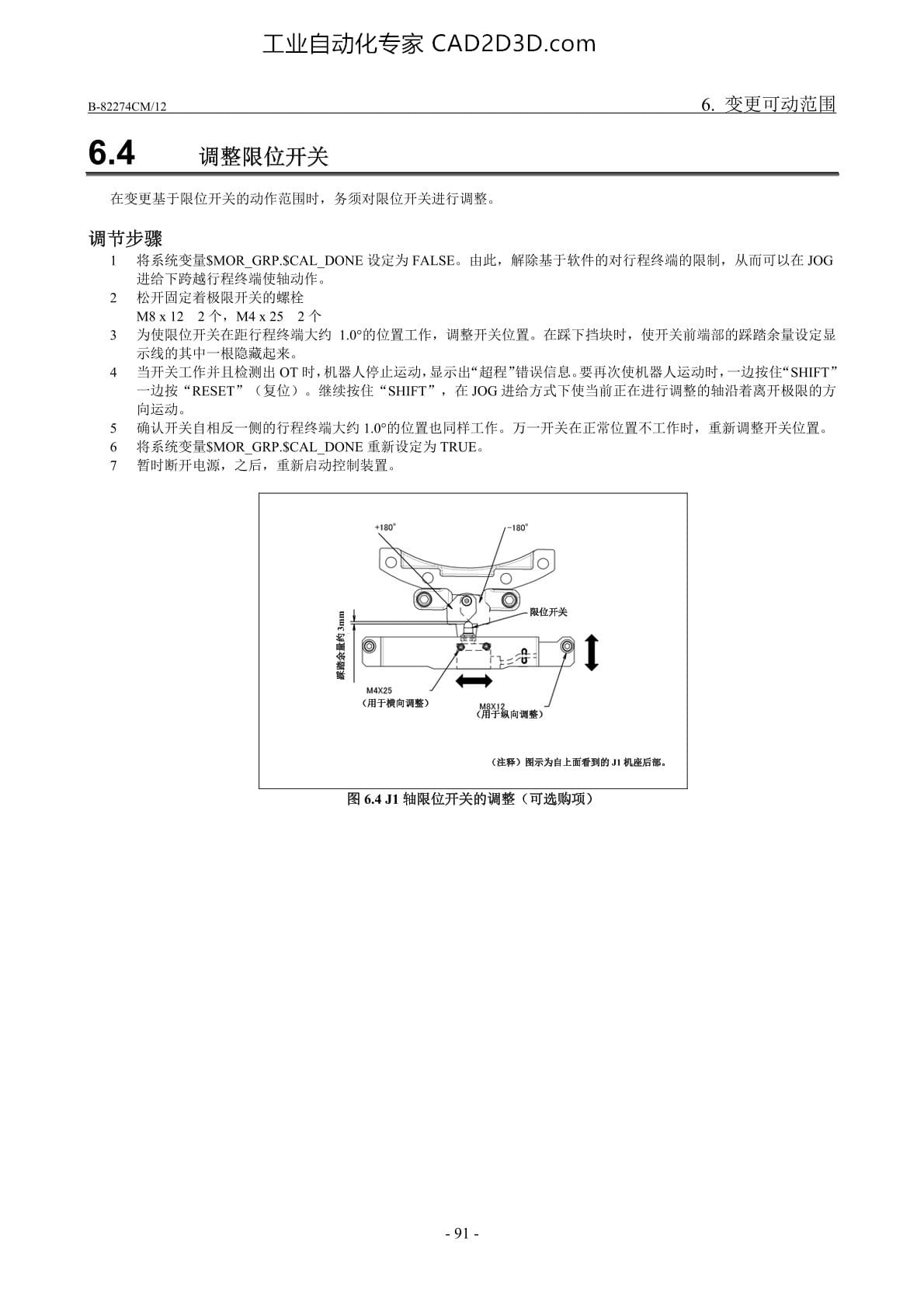
9 1.0? 的 位 置 工 作 , 调 整 开关 位 置 。 在 踩 下 挡 块 时 , 使 开关 前 端
部 的 踩踏 余 量 设 定 显
- 作 并 且 检测 出 OT 时 , 机 器 人 停止 运动 , 显示 出 “ 超 程 ”错误
“RESET”〈 复 位) 。 继 续 按 住 “SHIFT”, 在 JOG 进 给 方式
要 再 次 使 机 器 人 运动 时 , 一 边 按 住

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)