3 维广域传感器重心测量工具
工业 自动 化 专家 CAD2D3D.com
B-83304CMI04
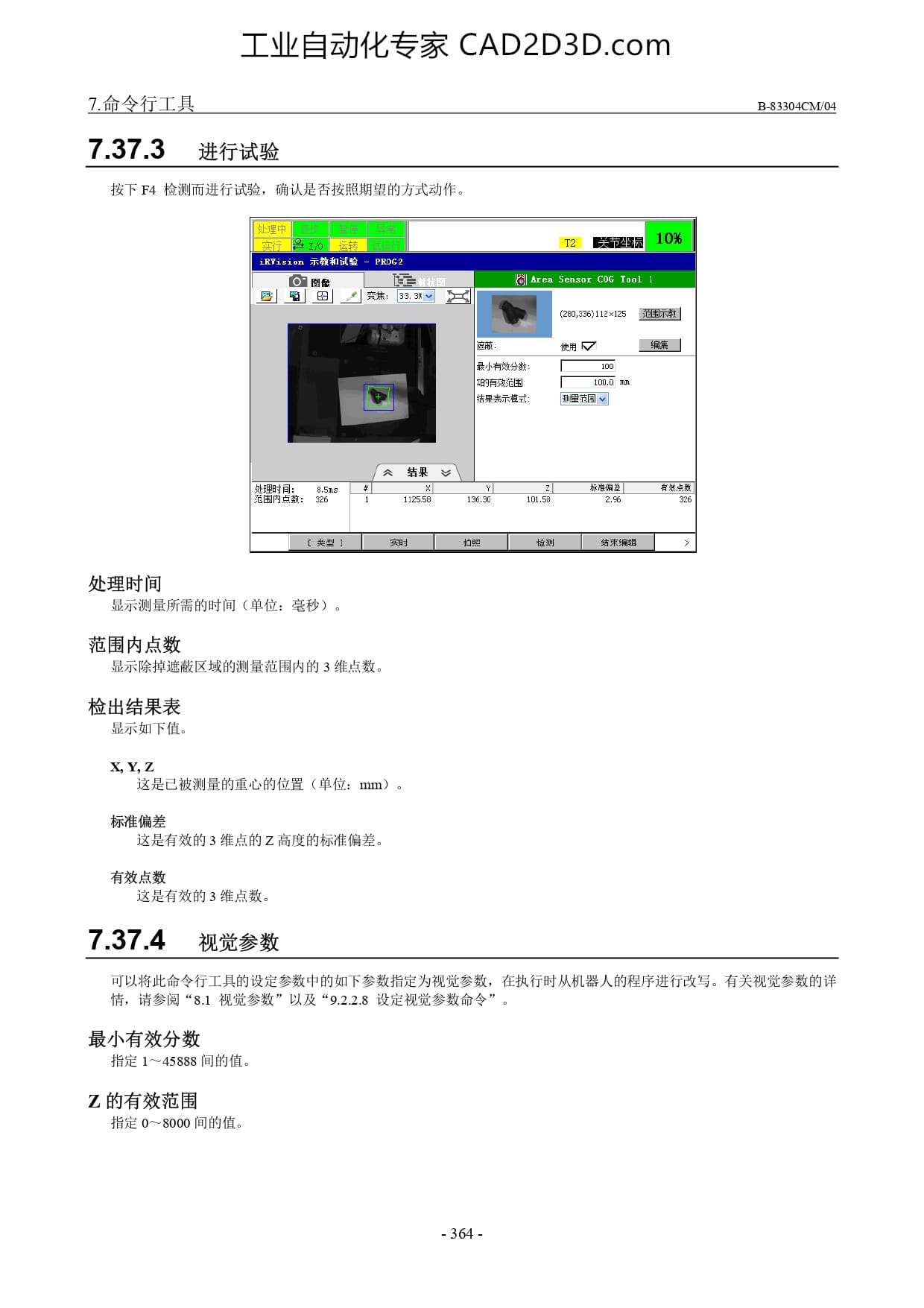
按 下 F4 检测 而 进行 试验 ,
确认 是 否 按照 期 望 的 方式 动作 。
|
B| B 8] sk oy =
(s ez AL
B3 使 用 7 一 |
回
[
(T
—
/A &R v\
e | F] % v 7 FERE] WHEA]
@5 1 Tizsse e o 2% w5
[ =61 £ 到 i >
司
则 量 所 需 的 时 间 〈 单 位 : 毫秒 ) 。
内 点 数
遮蔽 区 域 的 测量 范围 内 的 3 维 点 数 。
显示
检 出 结果 表
显示 如 下 值 。
XY,z
这 是 已 被 测量 的 重心 的 位 置 〈 单 位 : mm) -。
标准 偏差
这 是 有 效 的 3 维 点 的 己 高 度 的 标准 偏差 。
有 效 点 数
这 是 有 效 的 3 维 点 数 。
7.37.4 ”视觉 参数
最 小 有 效 分 数
指定 1 一 45888 间 的 值 。
乙 的 有 效 范围
指定 0 一 8000 间 的 值 。
-364 -
在 执行 时 从 机 器 人 的 程序 进行 改写 。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)