安装 机器人基座和尺寸
工业 自动 化 专家 CAD2D3D.com
B-82274CM/12 1. 搬运 和 安装
1.1.1 有 关 安 装着 末端 执行 器 时 的 搬运
有 焊 枪 和 机 械
B, W2 fJLJ&WJ 的 振动 等
坏 速度 。
器 的 状 ; 时 , 应 将 手臂 用 木材 等 固定 起 来 后 运送 。 若 没有 固定 好 手
出 执行 器 励 振 , 致 使 较 大 的 冲击 载荷 作用 于 机 器 人 的 减速 机 , 从 而 加 快 减 速 机 的 损
图 1.1.1 安装 着 末端 执行 器 时 搬运 时 的 固定 例
1.2 安装
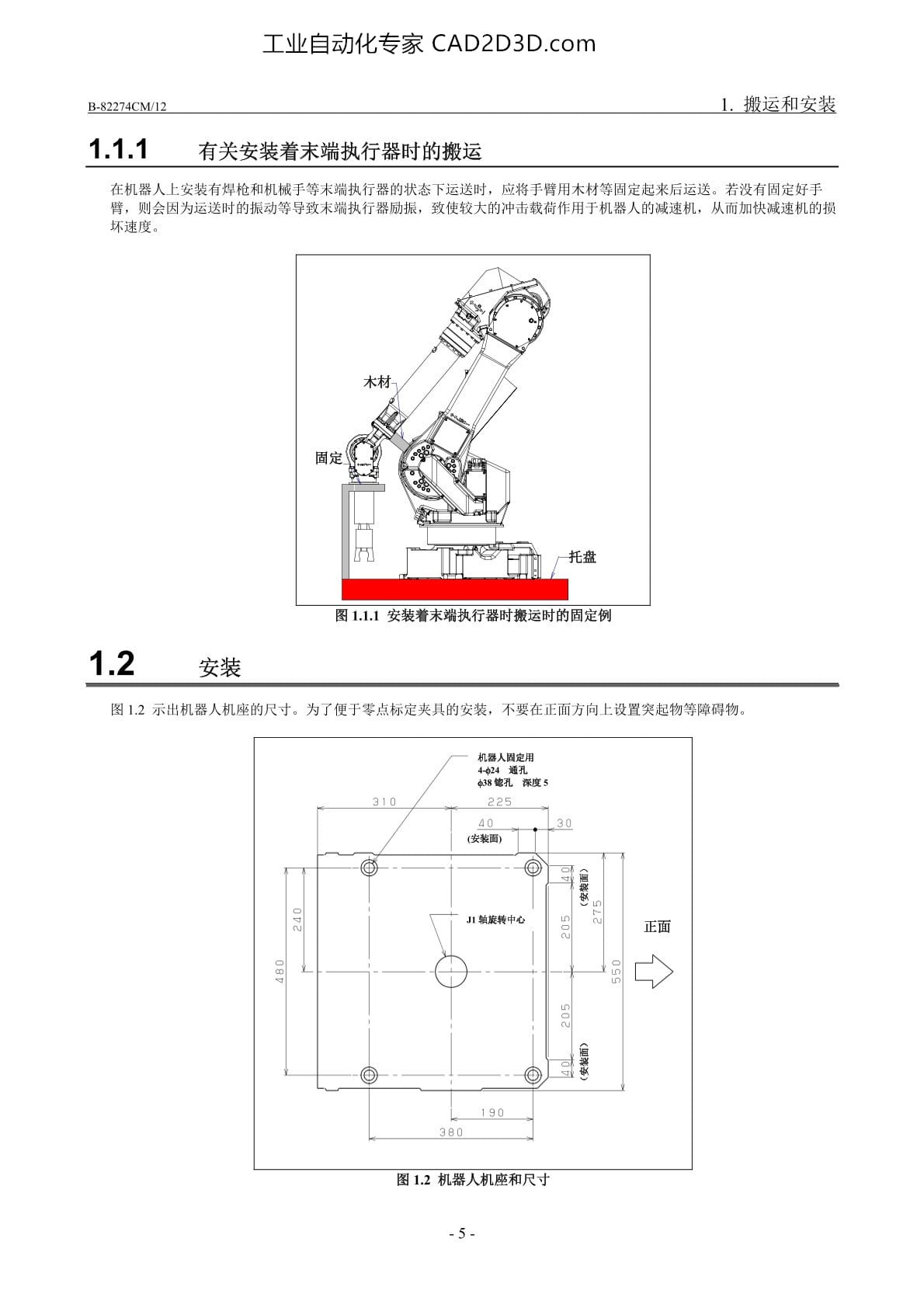
图 1.2 示 出 机 器 人 机 座 的 尺寸 。 为 了 便于 零点 标定 夹具 的 安装 , 不 要 在 正面 方向 上 设置 突起 物 等 障碍 物 。
机 器 人 固定 用
/ 24 通 孔
38 鸳 孔 ”深度 5
图 1.2 机 器 人 机 座 和 尺寸
-和
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)