断电停止时作用的力以及力矩
B-82274CM/12
业
自动 化 专家 CAD2D3D
.com
1. 搬运 和
安装
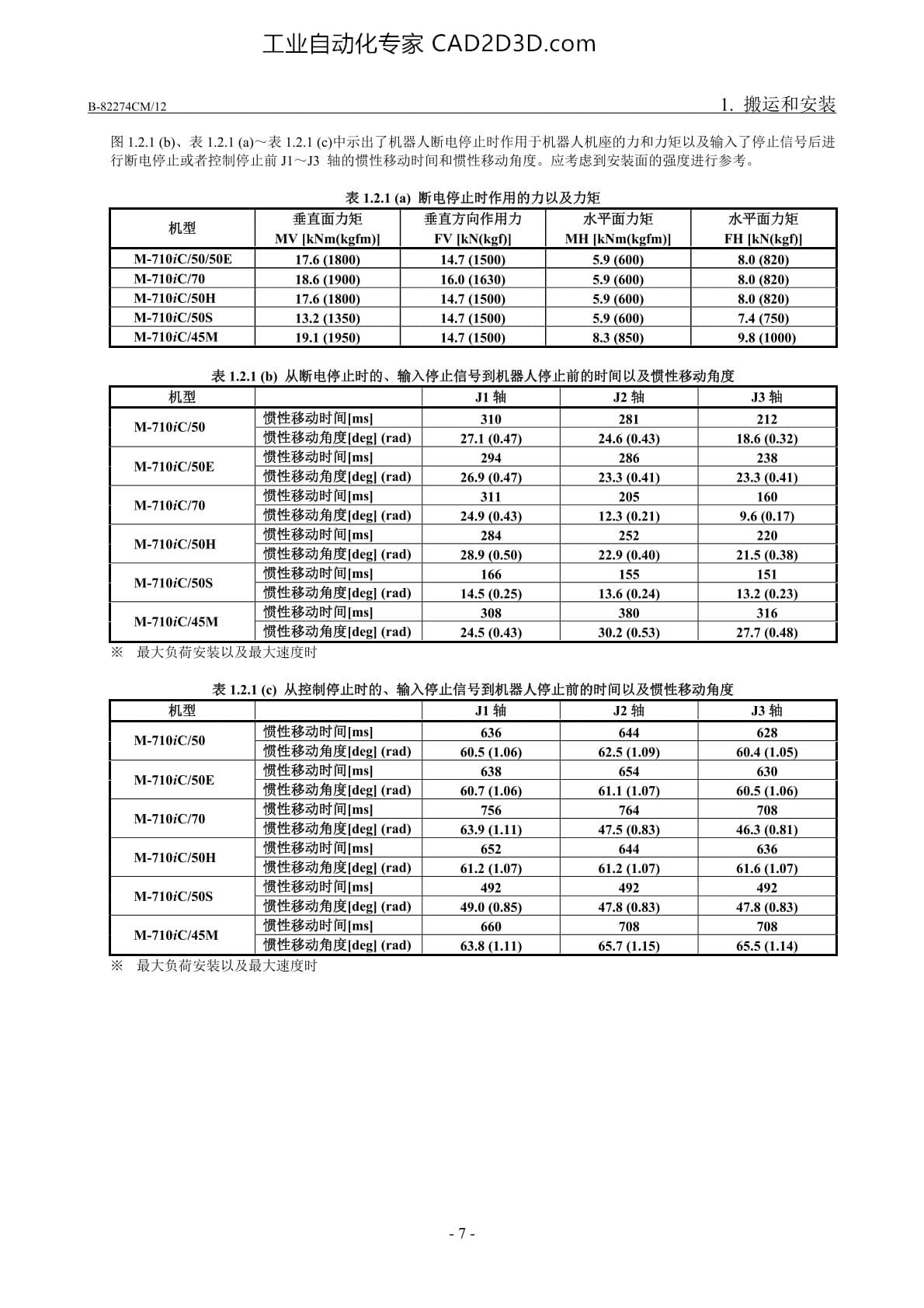
图 1.2.1 (b)
M-710iC/50/50E
表 1.2.1 (9)
-或 者 控制 停止 前 了 一 了 轴 的 惯性 移动 时 间 和 惯性 移动 角度 。
- 表 1.2.1 (中 示 出 了 机 器 人 断 电 停止 时 作用 于
表 1.2.1(a) 断 电 停止 时 作用 的 力
垂直 面 力矩 垂直 方向 作用 力
MV [kNm(kgfm)] FV [kN(kgh]
17.6 (1800) 14.7 (1500)
机 器 人 机 座 的 力 和 力矩 以 及 输入 了 停止 信号 后 进
应 考虑 到
装 面 的 强度 进 和
以 及 力 托
水 平面 力 抢
MH [kNm(kgfm)|
5.9 (600)
水 平面 力矩
FHIkN(kgD
8.0 (820)
M-710iC/70
18.6 (1900) 16.0 (1630)
5.9 (600)
8.0 (820)
M-710iC/50H
17.6 (1800) 14.7 (1500)
5.9 (600)
8.0 (820)
M-710iC/508
13.2 (1350) 14.7 (1500)
5.9 (600)
7.4(750)
M-710iC/45M
121
19.1 (1950) 14.7 (1500)
8.3 (850)
9.8 (1000)
人 从 断 电 停止 时 的 、 输 入 停止 信号 到 机 器 人 停止 前 的 时 间 以 及 惯性 移动 角度
CS 全 人 (rad) 二 前 而 了 人 1 人
MATI0CISOE gggggg:fll (rad) 26.92 二 下 人 1 和
MR gfiggzg::l:| (rad) 14.9J :«:.m 12.31 5 ET
TI 训导 过 多 民 Il (rad) 二 而 二 21 52 ::)].38)
MT 放下 (rad) 证 4 河 寺 1 沁 讲 遍 |
ML7IOC4SM 设 本 民 下 (rad) 24.53 ?(?.43) 34121 fc‘:sa) 27.73 :;45)
X RO 2 LA R RO FE R
表 1.2.1(c) 从 控制 停止 时 的 、 输 入 停止 信号 到 机 器 人 停止 前 的 时 间 以 及 惯性 移动 角度
机 型 本 轴 卫 轴 J3 轴
| 5 放生 作 人 (rad) 寻 .06) 人 是 |
| worca 机 各 动 度 人 Nd (rad) so.: 全 .06) 时 有 GE |
MCA 人民 (rad) 63.97 ff.m 二 和
M-710iCISOH ;figgz;::&“ (rad) 61 z6 flz .07) 二 全
ee 衣 和 人 风 (rad) 49.: 35.85) 47.: ‘(;;ss) 47.:: ?;.ss)
惯性 移动 时 间 [msl 660 708 708
M-710iC/45M
惯性 移动 角度 [degl (rad)
63.8 (1.11)
65.7 (1.15)
655 (1.14)
最 大 负荷 安装 以 及 最 大 速度 时
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)