常见问题处理方法
B-83754CM/03
T
=
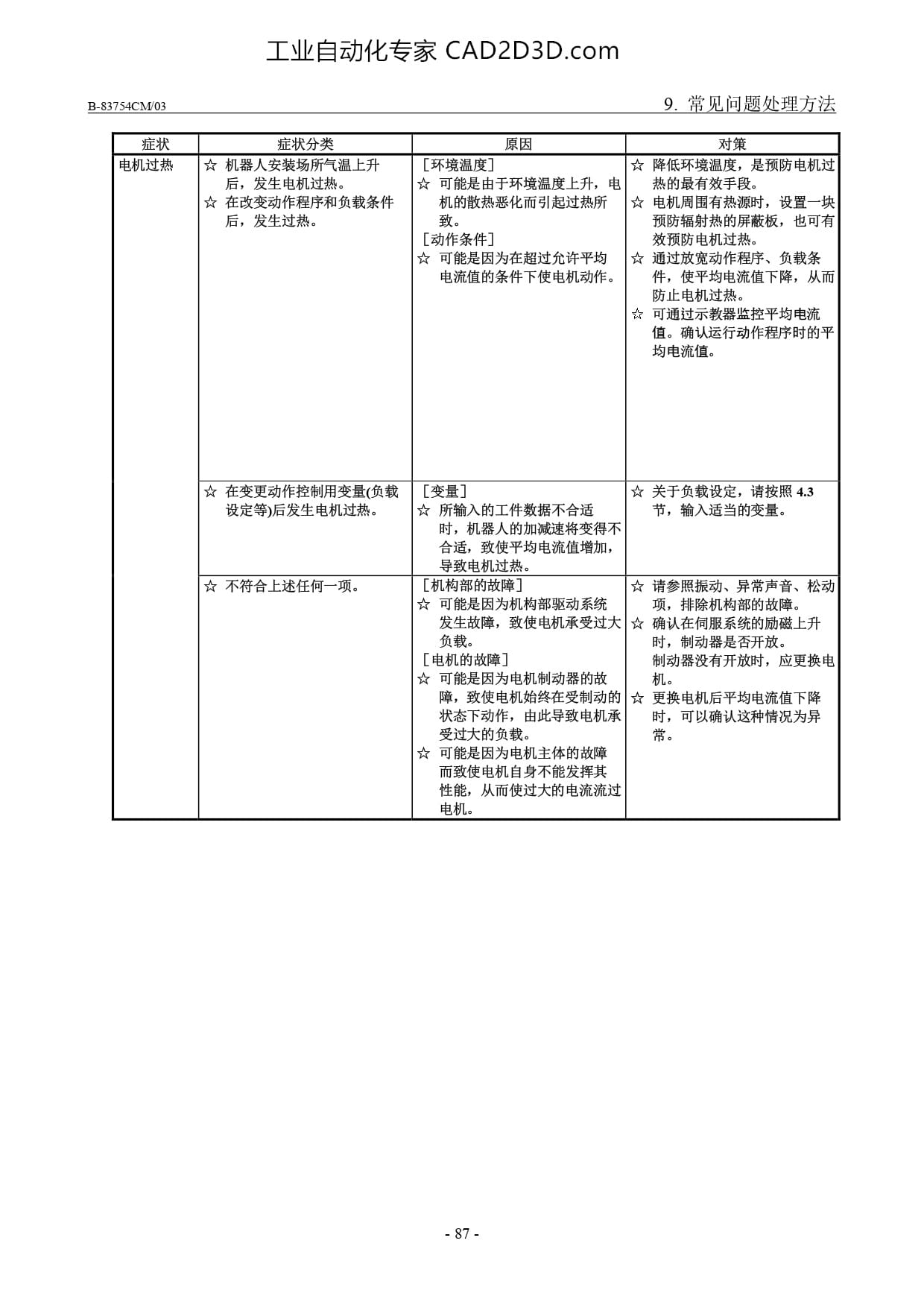
六 机 器 人 安装 场所 气温 上 升
后 , 发 生 电机 过 热 。
* 在 改变 动作 程序 和 负载 条 件
后 , 发 生 过 热 。
自动 化 专家 CAD2D3D.com
[环境 温度 ]
认可 能 是 由 于 环境 温度 上 升 , 电
机 的 散热 恶化 而 引起 过 热 所
致 。
[动作 条 件 ]
认可 能 是 因为 在 超过 允许 平均
电流 值 的 条 件 下 使 电机 动作 。
9. 常见 问题 处 理 方法
次 降低 环境 温度 , 是 预防 电机 过
热 的 最 有 效 手段 。
六 电机 周围 有 热源 时 , 设 置 一 块
预防 辐射 热 的 屏蔽 板 , 也 可 有
效 预防 电机 过 热 。
¥ 通过 放宽 动作 程序 、 负 载 条
件 , 使 平均 电流 值 下 降 , 从 而
防止 电机 过 热 。
去 可 通过 示 教 器 监控 平均 电流
值 。 确 认 运 行动 作 程序 时 的 平
均 电 流 值 。
交 在 变更 动作 控制 用 变量 (负载
设 定 等 ) 后 发 生 电机 过 热 。
[变量 ]
六 所 和 输入 的 工件 数据 不 合适
时 , 机 器 人 的 加 减速 将 变 得 不
合适 , 致 使 平均 电流 值 增加 ,
导致 电机 过 热 。
六 关于 负载 设 定 , 请 按照 43
节 , 输 入 适当 的 变量 。
六 不 符合 上 述 任何 一 项 。
[机 构 部 的 故障 ]
认可 能 是 因为 机 构 部 驱动 系统
发 生 故障 , 致 使 电机 承受 过 大
负载 。
[电机 的 故障 ]
认可 能 是 因为 电机 制动器 的 故
障 , 致 使 电机 始终 在 受制 动 的
状态 下 动作 , 由 此 导致 电机 承
受过 大 的 负载 。
识 可 能 是 因为 电机 主体 的 故障
而 致使 电机 自身 不 能 发 挥 其
性 能 , 从 而 使 过 大 的 电流 流 过
电机 。
-87-
六 请 参照 振动 、 异 常 声音 、 松 动
项 , 排 除 机 构 部 的 故障 。
认 确认 在 伺服 系统 的 励磁 上 升
时 , 制 动 器 是 否 开放 。
制动器 没有 开放 时 , 应 更 换 电
机 。
o 更 换 电机 后 平均 电流 值 下 降
时 , 可 以 确认 这 种 情况 为 异
i~
Mo
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)