变更可动范围
工业
6._ 变更 可 动 范围
动 化 专家 CAD2D3D.com
B-83644CM/06
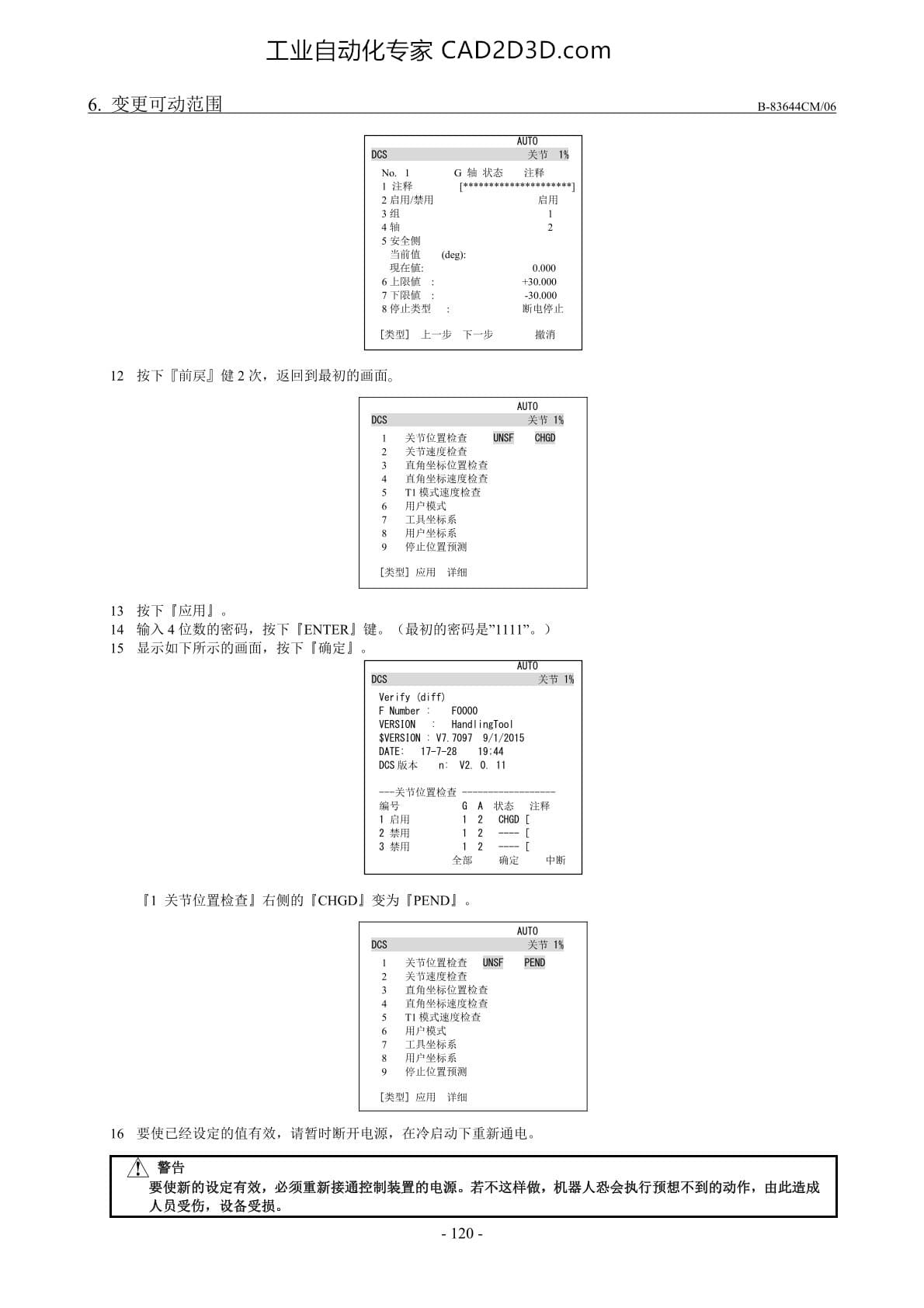
12
13 #F [RA .
14 输入 4 从
数 的 密码 , 按 下 『ENTER】」 键 。
2 按 下 『 前 厌 ] 健 2 次, 返回 到 最 初 的 画面 。
关节 速度 检查
停止 位 置 预测
[类 型 ] 应 用 “详细
pcs
No 1
1 注释
2 BRI
3 组 1
4 2
5 安全 便
当前 值 。 (de
在 值 : 0.000
+30.000
30,000
8 停止 类 型 Wity
[类 型 】 上 一 步 下 一 步 it
AUTO
s K45 1%
半 检 查 USE 。 oHGD
15 显示 如 下 所 示 的 画面 , 按 下 『 确 定 上 」 o
《最 初 的 密码
是 "1111"。)
DCs
Verify (diff)
DATE: 17-7-28
F Number F0000
VERSION Hand| ingTool
SVERSION © V7.7097 9/1/2015
T
K%
19:44
一 关节 位 置 检查 一 一 -一 一
DCS 版 本 mW 0 1
T1 关节 位 置 检查 」 右 侧 的 TCHGD4 变 为 『TPEND1 。
停止 位 置 预 测
[类 型 ] 应 用 “详细
编号 6 A 状态 注释
1 启用 1 2 oD [
2 禁用 1 2 [
3 禁用 12—
全 部 确定 il
AUTO
DCs KA 1%
PEND
16 要 使 已 经 设 定 的 值 有 效 , 请 暂时 断 开 电源 , 在 冷 启 动 下 重新 通电 。
要 使 新 的 设 定 有 效 , 必 须 重新 接 通 控制 装置 的 电源 。 若 不 这 样 做 , 机 器 人 丽 会 执行 预想 不 到 的 动作 , 由 此 造成
人 员 受 伤 , 设 备 受 损 。
-120 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)