搬运和安装 从断电停止时、输入停止信号到机器人停止前的时间及惯性移动角度
工业 自动 化 专家 CAD2D3D.com
1. 搬运 和 安装 B-83644CM/06
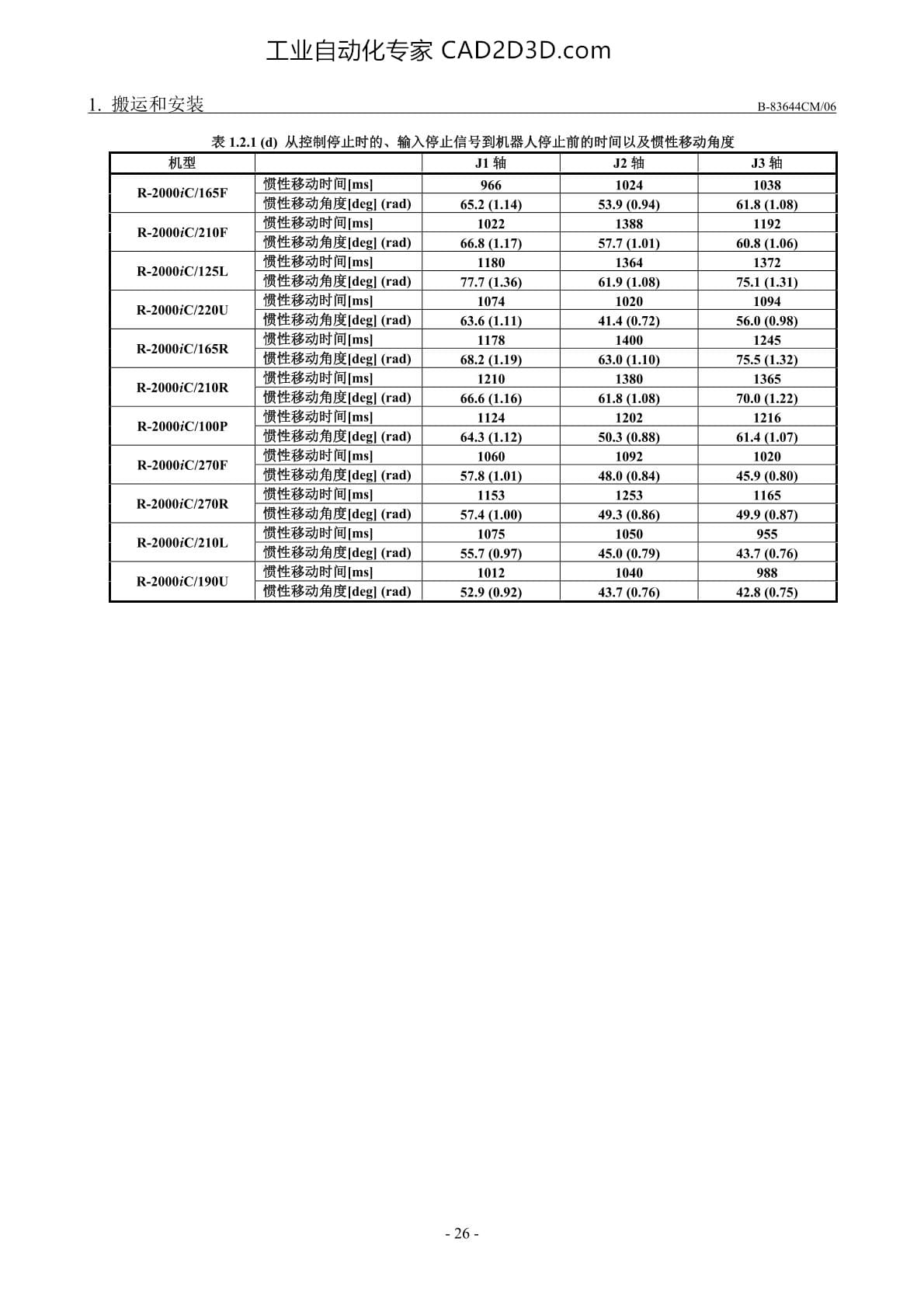
表 1.2.1(d) 从 控制 停止 时 的 、 输 入 停止 信号 到 机 器 人 停止 前 的 时 间 以 及 惯性 移动 角度
机 型 J1 J2 4 a3 i
| CO 衣 和 人 (rad) ( .14) ET La |
| oo ;Eggz;m (rad) se.;o{zlz.m 51;3(!:?0 1 T |
5 机 本 上 1 (rad) 77.17‘(::‘.]36) 51.;3(6:05) 75}3(71?31)
Re2000iC2200 giggzg::‘il (rad) 634]60(.:?1 1 41.:0(;?72) 55.:10:)‘.‘93)
R2000iC/165R ggggz;::‘% (rad) cs.;]::w) 63.(‘)4(2?10) 75.;2(41732)
人 全 人 (rad) HI TI 5
2 人 人 时 (rad) 644;‘{11?12) 50.32(':!3) 61.12:07)
RCI 全 人 人 民 全 (rad) 57.:;0((;[.'01) 48.::)(?1?34) 45.;0(7)(.)80)
R-2Z000IC270R gggggg:;flil (rad) ET TD 9 oa
人 后 (rad) 55.;‘1(1597» 45.(11':?)'.)79) 5
R-200ic/1200 gzgg:g:zfi (rad) 51.;04::92) 43.'7017]'.)76) 42.39 有
<
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)