安装设备到机器人上
工业 自动 化 专家 CAD2D3D.com
B-83644CM/06 4. 安装 设备 到 机 器 人 上
信安 装 设备 到 机 器 人 上
4.1 安装 末端 执行 器 到 手腕 前 端
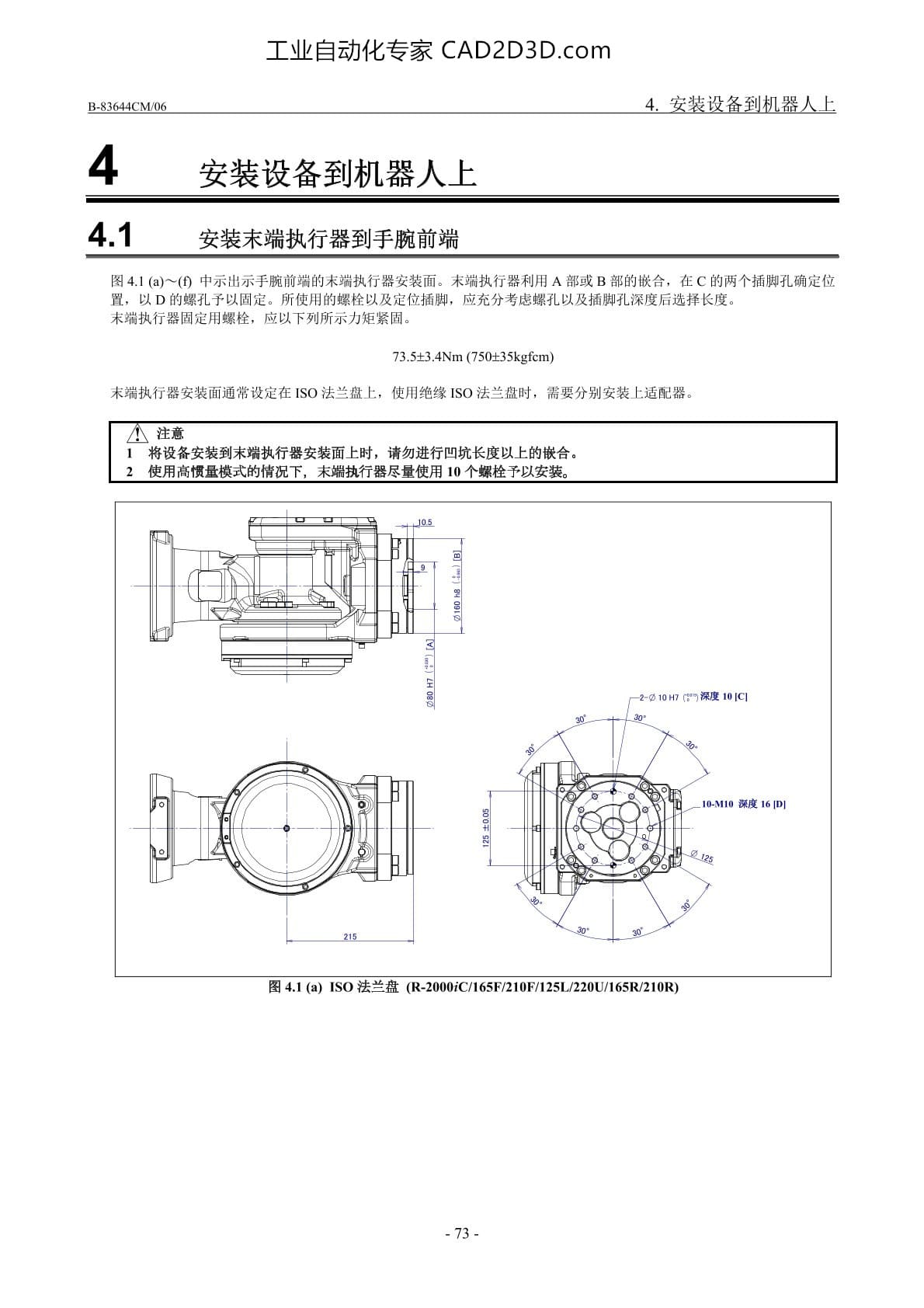
图 4.1 (9)~(9 中 示 出 示 手 腕 前 端的 未 端 执行 器
置 , 以 D 的 螺 孔 予以 固定 。 所 使 用 的 螺栓 以 及 定 人
器 固定 用 螺栓 , 应 以 下 列 所 示 力 矩 紧 固 。
% 面 。 末 端 执行 器 利用 A 部 或 B 部 的 嵌 合 , 在 C 的 两 个 插脚 孔 确定 位
六 插脚 , 应 充分 考虑 螺 孔 以 及 插脚 孔 深度 后 选择 长 度 。
73.5+3.4Nm (750+£35kgfem)
, 使 用 绝缘 ISO 法 兰 盘 时 , 需 要 分 别 安装 上 适配器 。
1 将 设备 安装 到 末端 执行 器 安装 面 上 时 , 请 勿 进行 四 坑 长 度 以 上 的 嵌 合 。
2 _ 使 用 高 惯量 模式 的 情况 下 , 未 上端 执行 器 尽量 使 用 10 个 螺栓 予以 安装 。
aeo he (ii [
g0 = RE 10 [C)
学
o >
5
ki 10V B 16D]
5 -
| 了 Dizs
.28
~,
Y
4.1(a) ISO =24 (R-2000iC/165F/210F/125L/220U/165R/210R)

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)