3 维广域传感器平面测量工具
工业 自动 化 专家 CAD2D3D.com
7 命令 行 工 具 B-§3304CM/04
10 0 17 Tz 4 BRGESE
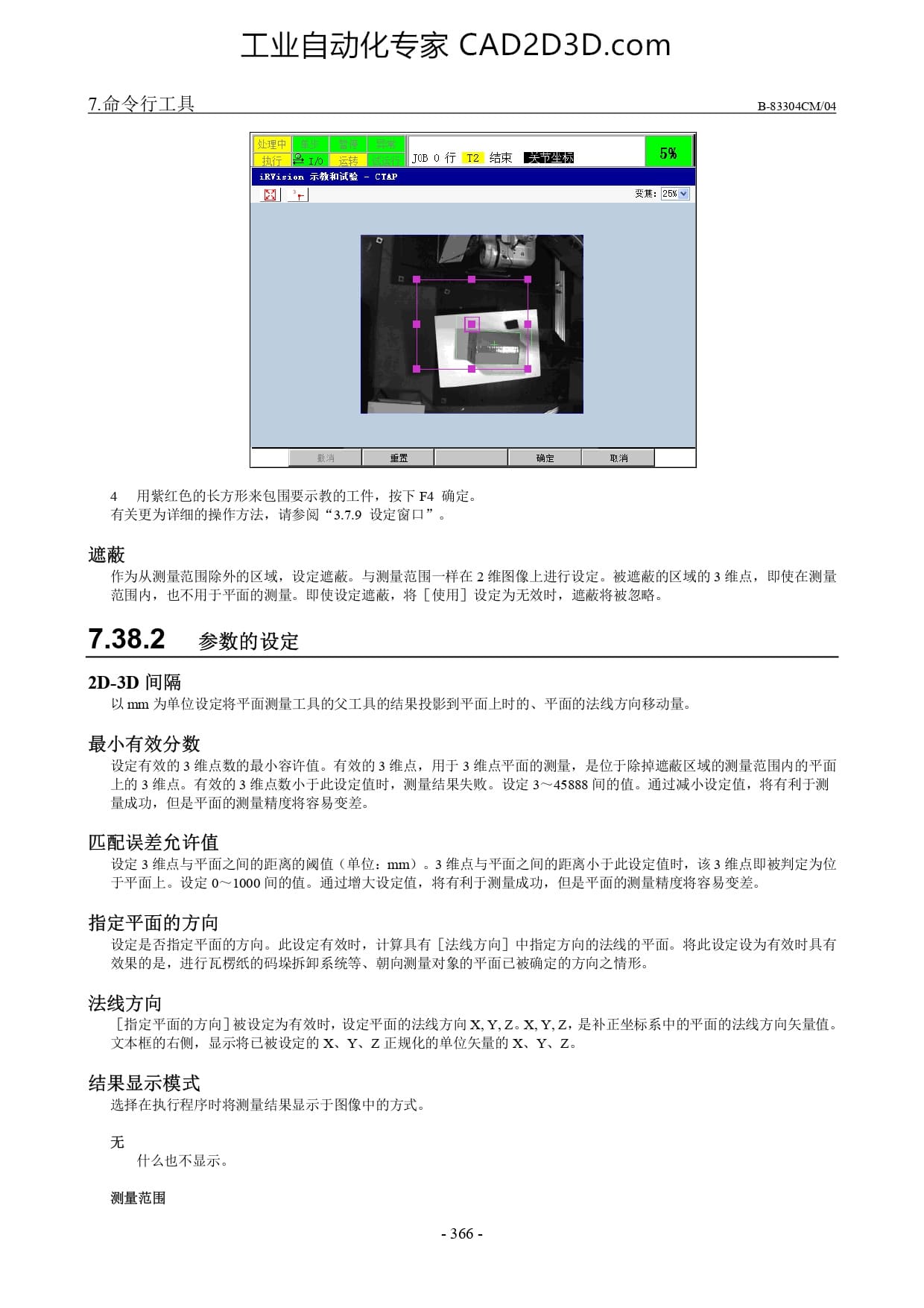
的 工件 , 按 下 F4 确定 。
“3.7.9 设 定 窗口 ”。
方形 来 包围
Tk, 1
遮蔽
作为 从 测量 范围 除外 的 区 域 , 设 定 遗 页 。 与 测量 范围 一 样 在 2 维 图 像 上 进行 设 定 。 被 遮蔽 的 区 域 的 3 维 点 , 即 使 在 测量
范围 内 , 也 不 用 于 平面 的 测量 。 即 使 设 定 遮 南 , 将 【使 用 ] 设 定 为 无 效 时 , 遮 蔽 将 被 忽略 。
7.38.2 ”参数 的 设 定
2D-3D 间隔
以 mm 为 单位 设 定 将 平面 测量 工具 的 父 工具 的 结果 投影 到 平面 上 时 的 、 平 面 的 法 线 方向 移动 量 。
最 小 有 效 分 数
的 测量 , 是 位 于 除 :
3 一 45888 间 的 值 。
围 内 的 平面
R 量
结果 失败 。 设 将 有 利于 测
2 得 是 平面 的 测量 精 /
匹配 误差 允许 值
设 定 3 维 点 与 平面 之 间 的 距离 的 阐 值 (单位 : mm) 。3
平面 之 间 的 距离 小 于 此 设 定 值 时 ,
于 平面 上 。 设 定 0 一 1000 间 的 值 。 通 过 增 大 设 定 值 , 将 有 利于 测量 成 功 , 但 是 平面 的
指定 平面 的 方向
设 定 是 和 否 和 面 的 方向 。 此 设 定 有 效 时 , 计 算 具 有 [法 的 平面 。 将 此 设 定 设 为 有 效 时 具有
效果 的 是 , 进 行 瓦楞 纸 的 码 井 拆 卸 系 统 等 、 朝 向 测量 对 象 的 平面 已 被 确
法 线 方 揣
生生 全 太 机 季 1 效 时 ,, 设 定 平面 的 法 线 方向 XX,Y,Z。 X,Y,Z, 是 补正 坐标 系 中 的 平面 的 法 线 方向 矢量
文本 框 的 右 侧 , 将 已 被 设 定 的 X、Y、Z 正规 化 的 单位 矢量 的 X、Y、Z。
结果 显示 模式
选择 在 执行 程序 时 将 测量 结果 显示 于 图 像 中 的 方式 。
无
什么 也 不 显示 。
测量 范围
-366 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)