3 维广域传感器重叠率检出工具
工业 自动 化 专家 CAD2D3D.com
7. 命 令 行 工 具 B-83304CM/04
7.38.4 ”视觉 参数
可 以 将 此 命令 行 工具 的 设 定 参数 中 的 如 下 参数 指定 为 视觉 参数 , 在 执行 时 从 机 器 人 的 程序 进行 改写 。 有 关 视 觉 参 数 的 详
情 , 请 参阅 “8.1 视觉 参数 ”以 及 “9.2.2.8 设 定 视觉 参数 命令 ”-。
最 小 有 效 分 数
指定 3 一 45888 间 的 值 。
匹配 误差 允许 值
指定 0 一 1000 间 的 值 。
7.39 。 3 维 广 域 传感器 重大 率 检 出 工具
3 维 广 域 传感器 重 登 率 检 出 工具 是 用 来 测量 重
果 的 平面 测量 在 上 方 取得 的 3 维 点
和 重生 率 的 一 种 工具 。 由 测量 区 域内 的 3 维
重 登 点 。 重 县 率 是 指 测量 区 域内 3 维 点 的 数量 与 重 登 点 的
测量 范围 内 的 3 维 点
平面 测量 工具 的 结果
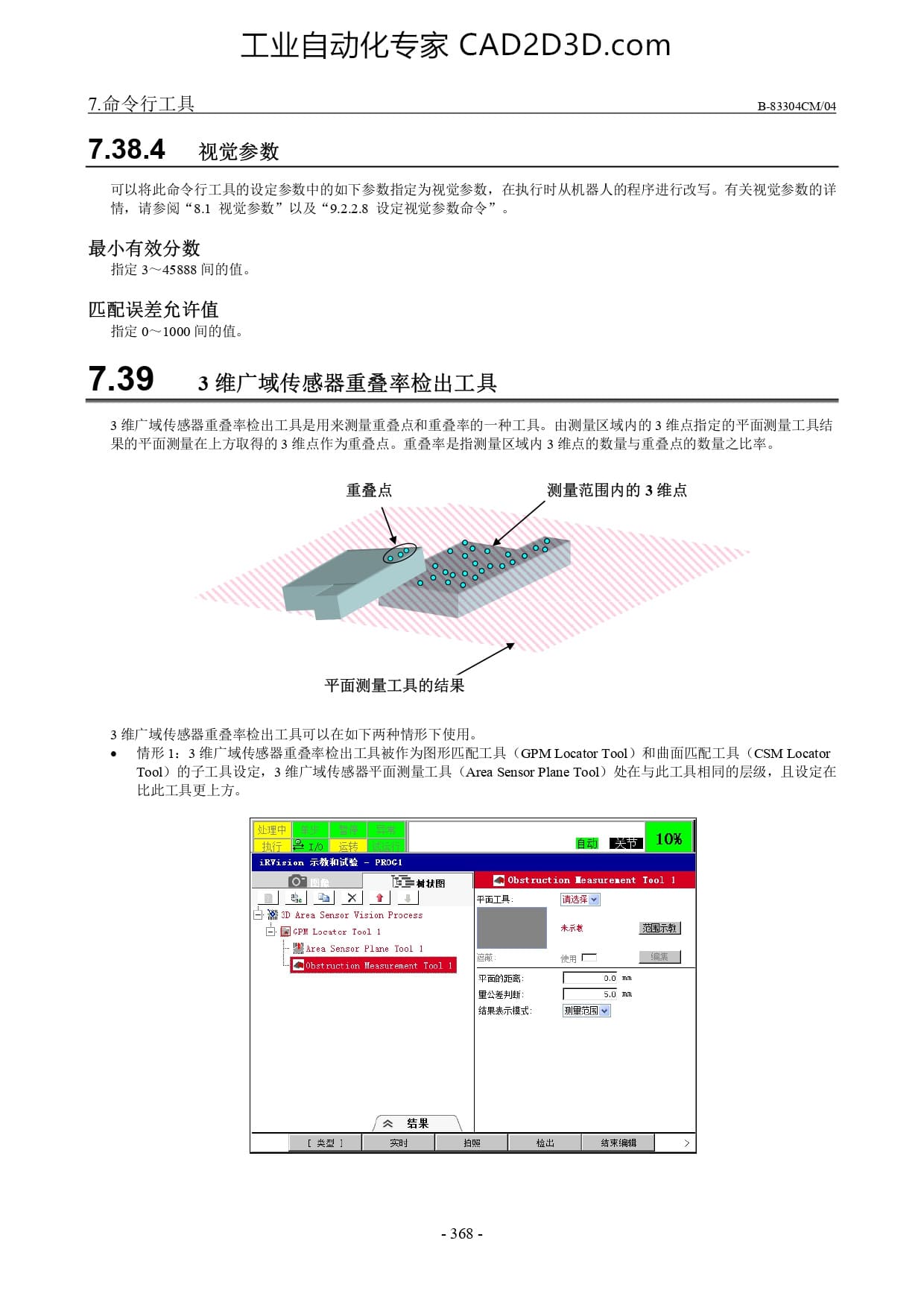
3 维 广 域 传感器 重 又 率 检 出 工具 可 以 在 如 下 两 种 情形 下 使 用 。
。 ”情形 1,3 维 广 域 传感器 重 伍 率 检 出 工具 被 作为 图 形 匹 配 工具 (GPMLocator Tool) 和 曲面 匹配 工具 〈CSM Locator
Tool) 的 子 工具 设 定 ,3 维 广 域 传感器 平面 测量 工具 (Area Sensor Plane Tool) 处 在 与 此 工具 相同 的 层级 , 且 设 定 在
比 此 工具 更 上 方 。
[类 型 1 实时 拍照 检 出 SR >
-368 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)