3 维广域传感器抓持位置检出工具
工业 自动 化 专家 CAD2D3D.com
7. 命 令 行 工 具 B-83304CM/04
7.
平
39.4 视觉 参数
可 以 将 此 命令 行 工具 的 设 定 参数 中 的 如 下 参数 指定 为 视觉 参数 , 在 执行 时 从 机 器 人 的 程序 进行 改写 。 有 关 视 觉 参 数 的 详
情 , 请 参阅 “8.1 视觉 参数 ”以 及 “9.2.2.8 设 定 视觉 参数 命令 ”。
的 距离
萌 定 -10000 一 10000 间 的 值 。
量 公差 判断
7
攻 定 0 一 1000 间 的 值 。
.40 3 维 广 域 传感器 抓 持 位 置 检 出 工具
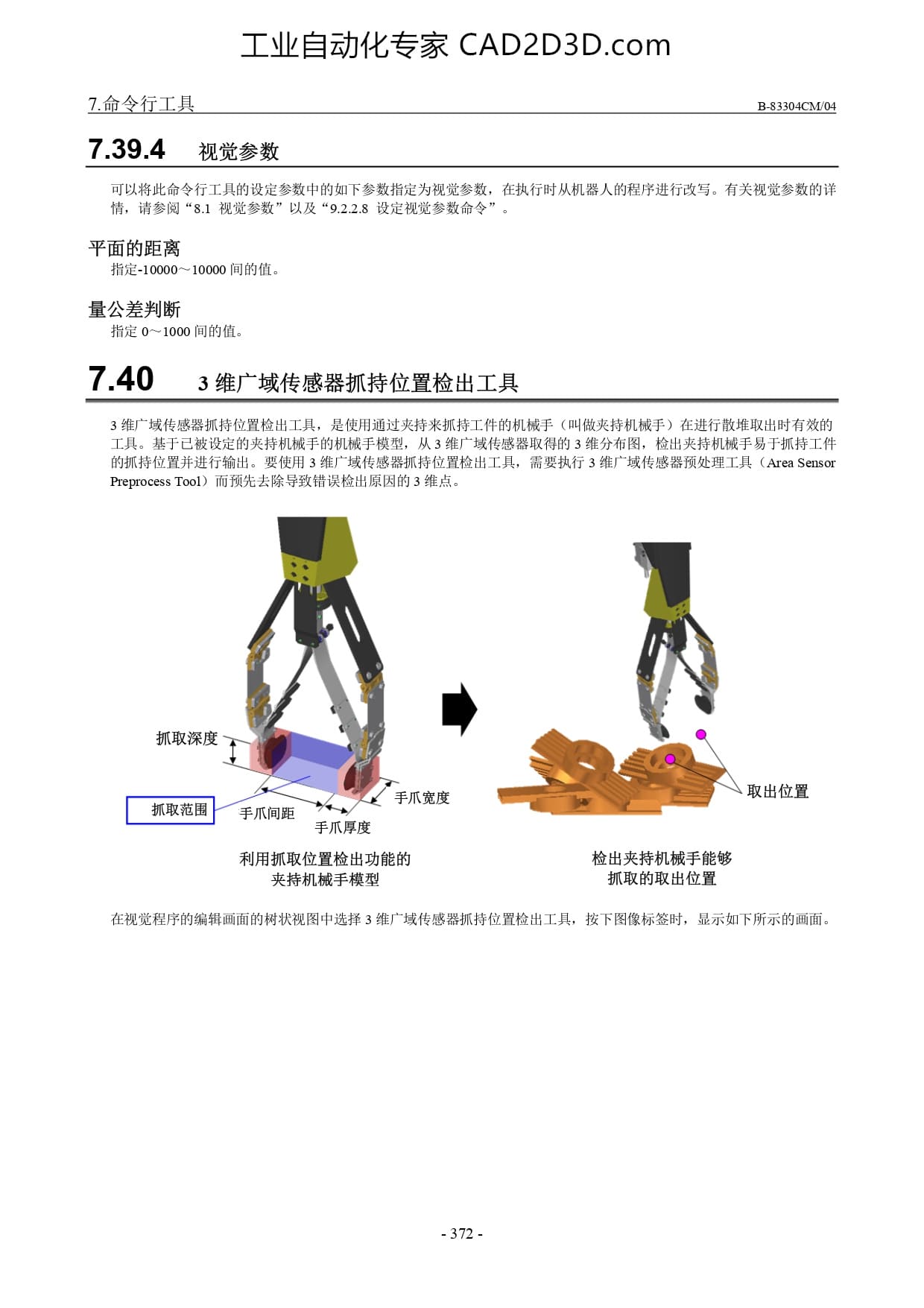
3 维 广 域 传感器 抓 持 位 置 检 出 工具 , 是 使 用 通过 夹 持 来 抓 持 工件 的 机 械 手 《叫做 夹 持 机 械 手 ) 在 进行 散 堆 取出 时 有 效 的
工具 。 基 于 已 被 设 定 的 夹 持 机 械 手 的 机 械 手 模型 , 从 3 维 广 域 传感器 取得 的 3 维 分 布 图 , 检 出 夹 持 机 械 手 易于 抓 持 工件
的 抓 持 位 置 并 进行 输出 。 要 使 用 3 维 广 域 传感器 抓 持 位 置 检 出 工具 , 需 要 执行 3 维 广 域 传感器 预 处 理工 具 〔Area Sensor
Preprocess Tool) 而 预先 去 除 导 致 错误 检 出 原因 的 3 维 点 。
利用 抓 取 位 置 检 出 功能 的 检 出 夹 持 机 械 手 能 够
夹 持 机 械 手 模型 抓 取 的 取出 位 置
在 视觉 程序 的 编辑 画面 的 树 状 视图 中 选择 3 维 广 域 传感器 抓 持 位 置 检 出 工具 , 按 下 图 像 标签 时 , 显 示 如 下 所 示 的 画面 。
-372 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)