3 维广域传感器抓持位置检出工具
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 7. 命 令 行 工 具
| ES 文 全 开关 已 释放
SU 70 Bl 中 上
|
g K7
=
0 =
7 m
[着 mm
W0
="
mmEns s [ 5
x 28 ) =
[A &R\ |smuEenE [ wom
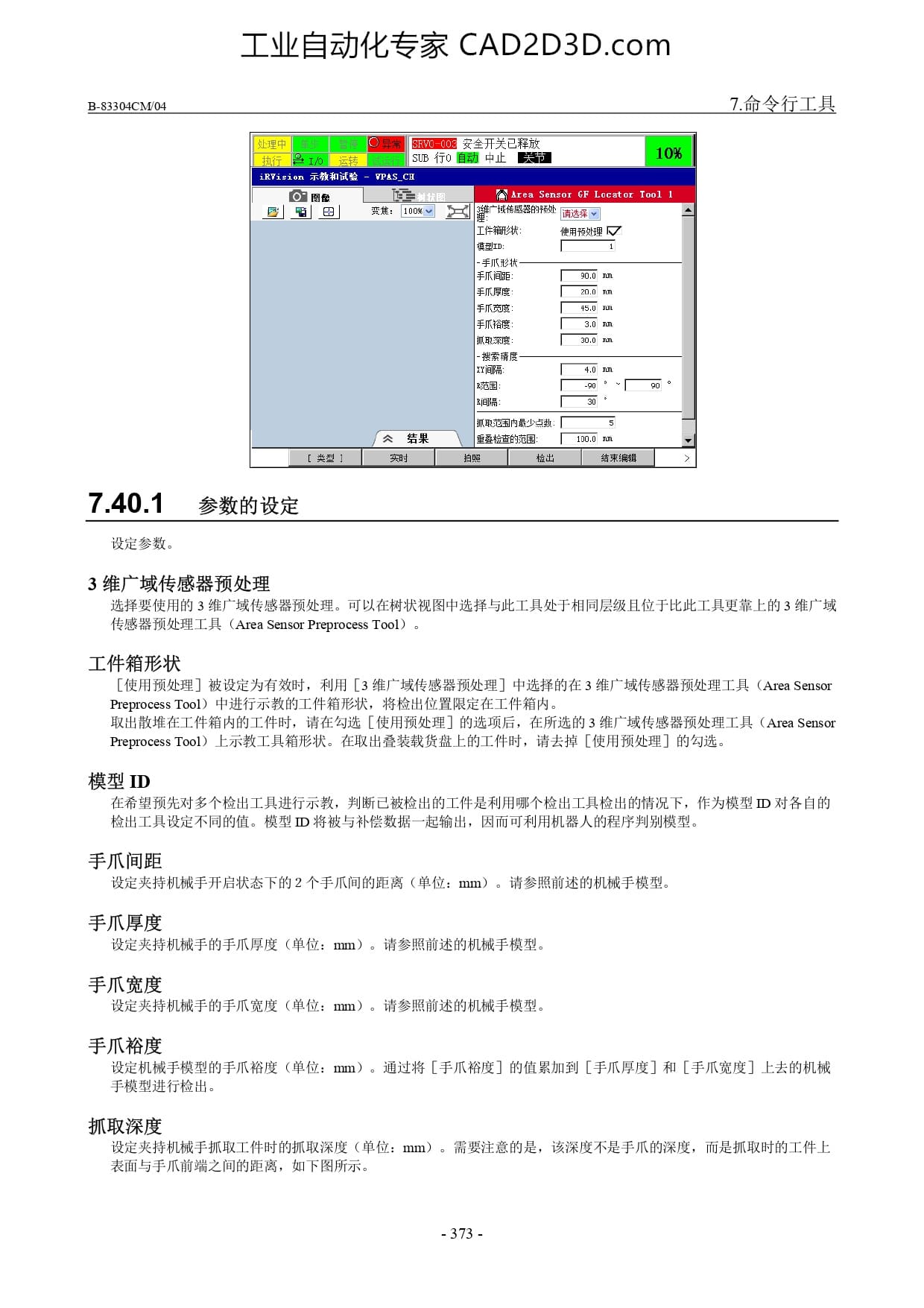
7.40.1 ”参数 的 设 定
设 定 参数 。
3 维 广 域 传感器 预 处 理
选择 要 使 用 的 3 维 广 域 传感器 预 处 理 。 可 以 在 树 状 视图 中 选择 与 此 工具 处 于 相同 层级 且 位 于 比 此 工具 更 靠 上 的 3 维 广 域
传感器 预 处 理工 具 (Area Sensor Preprocess Tool) 。
工件 箱 形状
使 用 预 处 理 ] 被 设 定 为 有 效 时 , 利 用 [3 维 广 域 传
Preprocess Tool) {1} RN TAFATEAR, A A 0 38 R £ TR N -
出 散 堆 在 工件 箱 内 的 工件 时 , 请 在 勾 选 【使 用 预 处 理 ] 的 选项 后 , 在 所 选 的 3 维 广 域 传感器 预 处 理工 具 (Area Sensor
Preprocess Tool) 上 示 教 工具 箱 形状 。 在 取出 受 装 载 货 盘 上 的 工件 时 , 请 去 掉 [使 用 预 处 理 ] 的 色 选 。
模型 ID
在 希望 预先 对 多 个 检 出 工具 进行 示 教 , 判 断 已 被 检 出 的 工件 是 利用 哪个 检 出 工具 检 出 的 情况 下 , 作 为 模型 ID 对 各 自 的
预 处 理 ] 中 选择 的 在 3 维 广 域 传感器 预 处 理工 具 〈Area Sensor
栓 出 工具 设 定 不 同 的 值 。 模 型 ID 将 被 与 补偿 数据 一 起 输出 , 因 而 可 利用 机 器 人 的 程序 判别 模型 。
爪 间距
设 定 夹 持 机 械 手 开启 状态 下 的 2 个 手 爪 间 的 距离 〈 单 位 mm) 。 请 参照 前 述 的 机 械 手 模型 。
爪 厚度
设 定 夹 持 机 械 手 的 手 爪 厚度 〈 单 位 : mm) 。 请 参照 前 述 的 机 械 手 模型 。
爪 宽度
设 定 夹 持 机 械 手 的 手 爪 宽度 〈 单 位 , mm) 。 请 参照 前 述 的 机 械 手 模型 。
手 爪 裕 度
设 定 机 械 手 模型 的 手 不 裕 度 〈 单 位 : mm) 。 通 过 将 【 手 爪 裕 度 ] 的 值 累 加 到 【[ 手 爪 厚度 ] 和 [ 手 爪 宽度 ] 上 去 的 机 械
手 模型 进行 检 出 。
抓 取 深度
设 定 夹 持 机 械 手 抓 取 工件 时 的 抓 取 深 度 〈 单 位 : mm) 。 需
表面 与 手 爪 前 端 之 间 的 距离 , 如 下 图 所 示 。
-373 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)