IRVDISPLAY4D iRConnect
工业 自动 化 专家 CAD2D3D.com
12. 其 他 选项 功能 B-83304CM/04
参数 2, 优 先 级 〈 输 入
以 1 一 3 的 整数 来
的 数据 的 优先 级 。 根 据 指定 的 优先 级 在 便携 式 终端 上 进行 高 亮 显示 。
0: 在 通知 作 以 指定 。 不 会 在 便携 式 进行 商 关 显 不 。
1: 在 通知 以 指定 。 示
2: 发 生 潜在 的 问题 时 予以 指定 。 在 便携 式 终端
3: 发 生 问题 时 予以 指定 。 在 便携 式 终端 上 以 红色 高 亮 中
时
出 的 程序 例 。 该 程序 在 如 下 情况 下 向 便携 式 多
从 出 结果 。
在 第 4 行 确认 测量 值 1, 若 较 低 训 《假设 视觉 程序 已 通过 测量 值 输出 工具 将 评分
作为 测量 值 1 而 输出 的 情形 ) 。 若 评分 虽 低 但 能 检 出 , 会 被 判断 为 生产 线 执行 不 成 问题 , 工 件 的 取出 照 此 继续 进行 。
这 是 预防 性 发 出 通知 的 示例 。
。 工件 名 败 时
在 第 7 行进 行 吸附 确认 , 若 未 能 吸附 就 判断 为 》
情况 通知 便携 式 终端 。 有 各 种 各 样 导 致 把 持 失 误 的
误 检 出 。
标签 LBL [999] , 3
察 被 发 送 到 便携 式 终端 的 图 像 , 就 可 确认 是 否 有 错
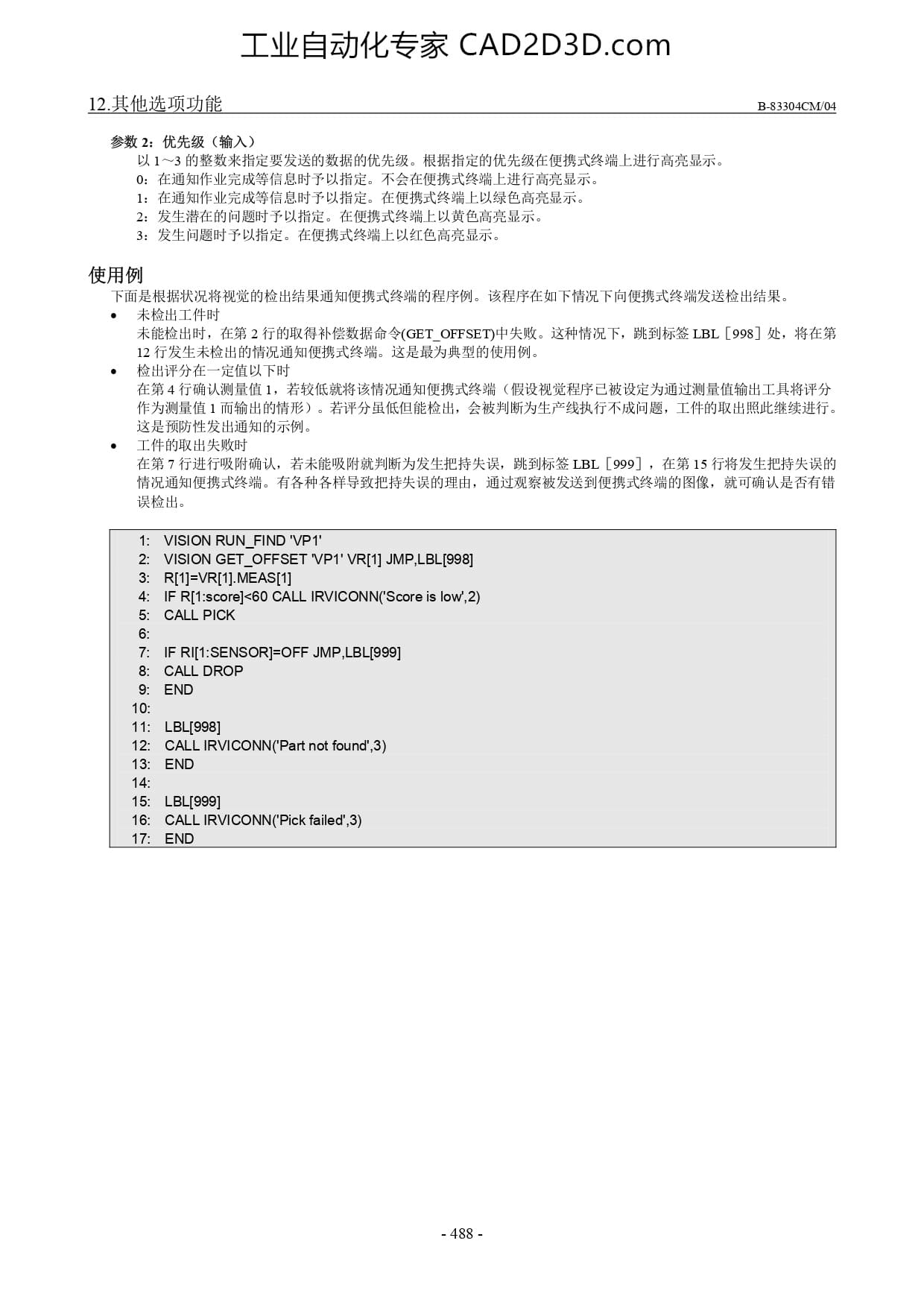
VISION RUN_FIND 'VP1'
VISION GET_OFFSET 'VP1' VR[] JMP,LBL[998]
R1]=VR[1].MEASI1]
IF R[1:score]<60 CALL IRVICONN('Score is low’,2)
CALL PICK
IF RI[1:SENSOR]=OFF JMP,LBL[999]
CALL DROP
END
多
©
10:
11: LBL[998]
12: CALL IRVICONN('Part not found',3)
13: END
14:
15: LBL[999]
16: CALL IRVICONN('Pick failed',3)
17: END
-488 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)