简易零点标定
工业 自动 化 专家 CAD2D3D.com
B-§3754CM/03 8. 零点 标定 的 方法
8.4 简易 零点 标定
[ SE AL P E AT 进行
一 周 以 内 的 转角 计算 。 利 用 1 转 以 内 的 转角
出 厂 时 , 已 被 设 定 在 表 8.3 的 位 置 。 如
不 能 将 机 器 人 移动 到 上 述 位 置 时 ,
会 带 来 许多 方便 。)
脉冲 计数 值 , 根 据 连接 在 电机 上 的 脉冲 计 编码 器 的 转速 和 回转
而 进行 简易 零点 标定 。
过 下 列 方 法 重新 设 定 简易 定 参 考点 。( 如 果 标 上 取代 对 合 标记 的 符号 , 将
由 于 用 来 后 备 脉 冲 计数 器 的 电池 电压 下 降 等 原因 而 导致 脉冲 计数 值 丢失 时 , 可 进行 简易 零点 标定 。
在 更 换 脉 冲 编码 器 时 以 及 机 器 人 控制 装置 的 零点 标定 数据 丢失 时 , 不 能 使 用 简易 零点 标定 。
设 定 简易 零点 标定 参考 点
1 按 下 “MENU” 【菜单 ) 键 , 显 示 出 画面 菜单 。
按 下 “0 下 页 ”, 选 择 .
按 下 F1“ 类 型 ”, 从 菜单 选择 “变量 ”。
如 果 $DMR._GRP[ 组 编号 ].8SGRAV_ MAST 的 值 为 1, 将 重力 补充 为 有 效 , 为 0 时 将 重力 补充 为 无 效 。 另 外 , 解 除 制
动 器 。
人 wm
注释
按照 如 下 所 示 方 式 改变 系统 变量 , 可 以 在 重力 补偿 有 效 / 无 效 之 间 切 换 。
SPARAM GROUP[ 组 编号 .SSV_DMY_LNKI[8] :FALSE (无 效 ) 或 者 TRUE (有 效 )
按照 如 下 所 示 方 式 改变 系统 变量 , 即 可 解除 制动器 控制 。
SPARAM GROUP.SSV_OFF ALL :FALSE
SPARAM GROUP.SSV_OFF ENB[] :FALSE〈 所 有 轴 )
改变 系统 变量 后 , 必 须 重新 启动 控制 装置 。
(不 设 定 重力 补偿 的 时 候 也 可 以 执行 零点 标定 , 但 是 会 影响 精度 )
5 通过 MENU (菜单 ) 选择 “6 系统 ”-。
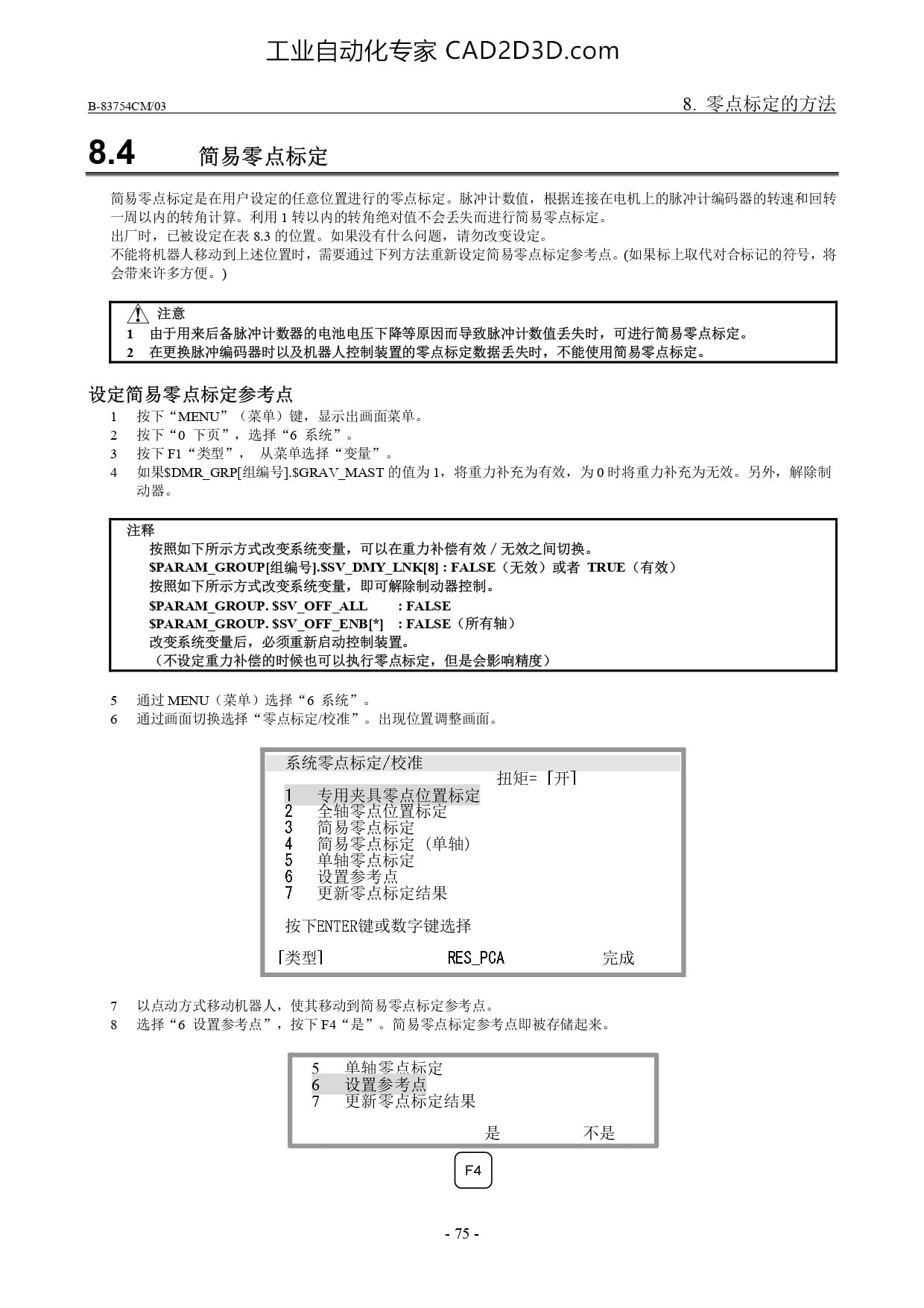
6 ”通过 画面 切换 选择 “零点 标定 /校准 ”。 出 现 位 置 调整 画面 。
系统 零点 标定 /校准
或 二 由
e
按 下 ENTER 键 或 数字 键 选择
[类 型 ] RES_PCA
7
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)