3 维广域传感器重叠率检出工具
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 7. 命 令 行 工具
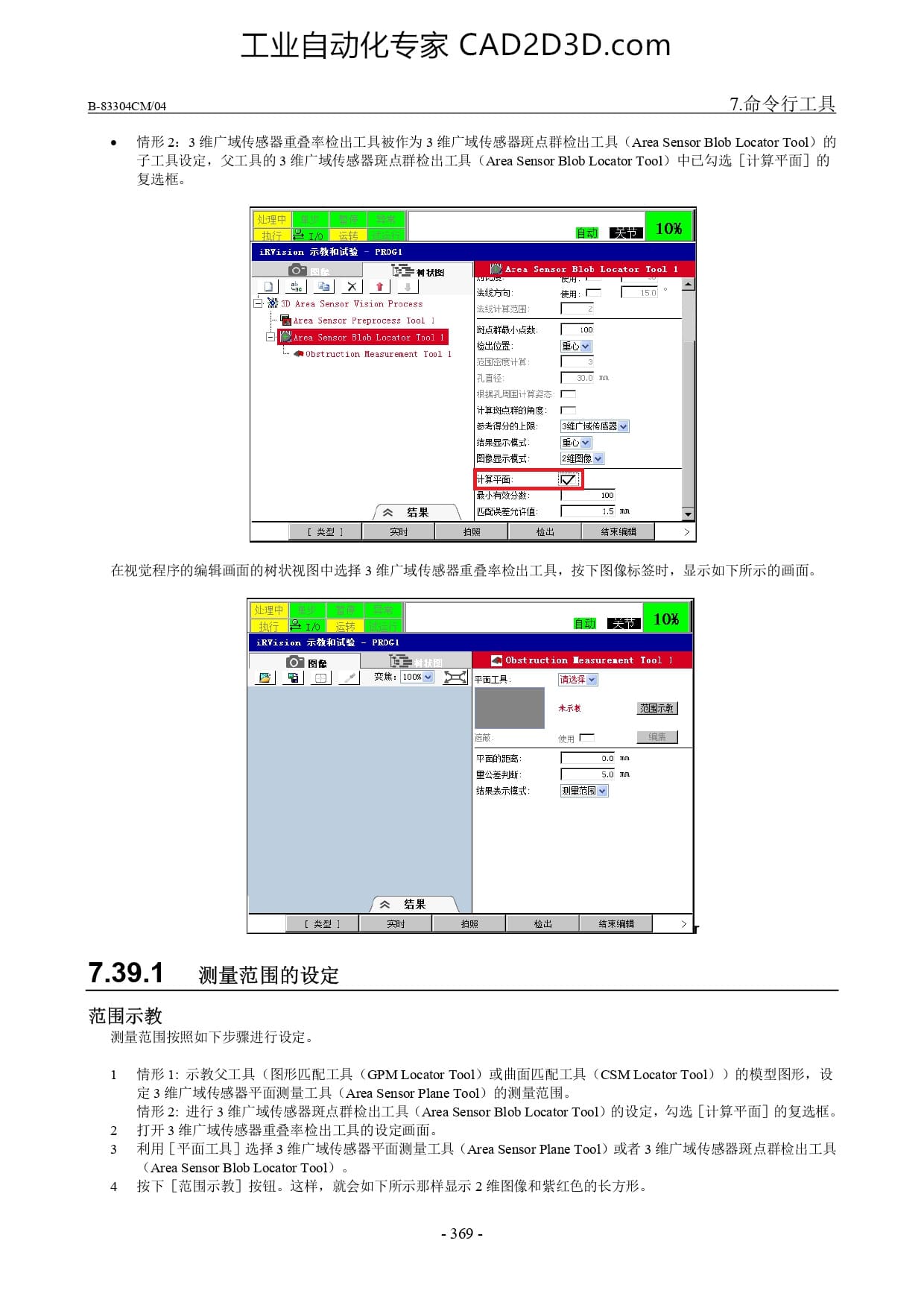
。 情形 2, 3 维 广 域 传 感 器 重 倒 率 检 出 工具 被 作为 3 维 广 域 传感器 斑点 群 检 出 工具 〈Area Sensor Blob Locator Tool) 的
子 工具 设 定 , 父 工具 的 3 维 广 域 传感器 斑点 群 检 出 工具 〈Area Sensor Blob Locator Tool) 中 已 匀 选 【计算 平面 ] 的
复 选 框 。
Ji# Azca Sensor Blob Locator Tool 1
ruction Mieasurenent Tool 1
在 视觉 程序 的 编辑 画面 的 树 状 视图 中 选择 3 维 广 域 传感器 重 琶 率 检 出 工具 , 按 下 图 像 标签 时 , 显 示 如 下 所 示 的 画面 。
Bl 8] o] -
BaEHM
结果 表示 楼 式 :
[类 型 1 实时 拍照 b AT >
7.39.1 ”测量 范围 的 设 定
范围 示 教
测量 范围 按照 如 下 步骤 进行 设 定 。
1 : 示 教 父 工具 〔 图 形 匹 配 工具 (GPMLocator Tool) 或 曲面 匹配 工具 CSMILocator Tool) ) 的 模型 图 形 , 设
了 国 测 县 (Area Sensor Plane Tool) 的 测量 范围 。
(Area Sensor Blob Locator Tool) 的 设 定 , 勾 选 【计算 平面] 的 复 选 框
2
利用 [平面 工具 ] 选择 3 维 广 域 传 器 下 而 量 工具 (Area Sensor Plane Tool) 或 者 3 维 广 域 传感器 斑点 群 检 出 工具
(Area Sensor Blob Locator Tool) -
4 按 下 [范围 示 教 ] 按钮 。 这 样 , 就 会 如 下 所 示 那 样
维 图 像 和 紫红 色 的 长 方形 。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)