3 维广域传感器重叠率检出工具
工业 自动 化 专家 CAD2D3D.com
7. 命 令 行 工 具 B-83304CM/04
J0b 04T 12 ek EREER
B e
< 下 4 确定 。
3.7.9 设 定 窗口 ”。
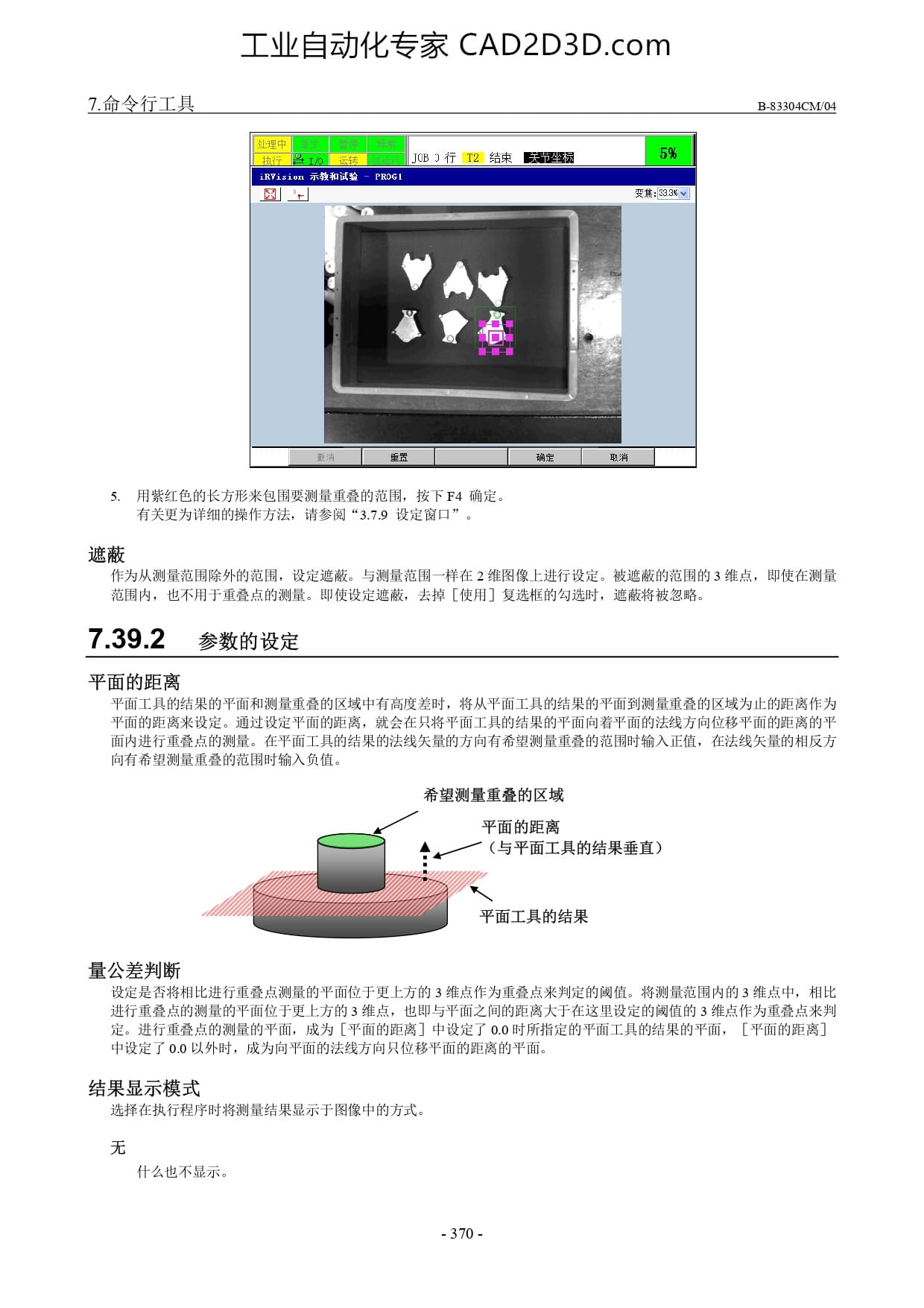
5 用 紫红 色 的 长 方形 来 包围 要 测量
有 关 更 为 详细 的 操作 方法 , 请 参
遮蔽
作为 从 测量 范围 除外 的 范围 , 设 定 遮 殴 。 与
范围 内 , 也 不 用 于 重 又 点 的 测量 。 即 使 设 定 遮 蔽 ,
7.39.2 ”参数 的 设 定
平面 的 距离
平面 工具 的 结果 的 平
平面 的 距
范围 的 3 维 点 , 即 使 在 测量
范围 一 样 在 2 维 图 像 上 进行 设 定 。 被 遮蔽
去 掉 [使 用 ] 复 选 框 的 勾 选 时 , 遍 蔽 将 被 忽略 。
止 的 距离 作为
的 距离 的 平
类 量 的 相反 方
测量 重 登 的 区 域 中 有 高 上
平面 的 距离 , 就 会
面 内 进 和 量 。 在 平面 工具 的 结果 的 法 线 矢量 的
向 有 希望 测量 4 范围 时 输入 负 值 。
希望 测量 重
平面 的 距离
全 。 一 一 《与 平面 工具 的 结果 垂直 )
画工 具 的 结果
量 公差 判断
计 上 全 村 放 比 闪 人 本 全 - 点 筷 围 内 的 3 维 点 中 , 相 比
HATESR Y, A ED T 2 DA B A T B SR BRI A 3 4B N TR k)
定 。 进行 重 和 点 [平面 的 距离 ] 中 设 定 了 0.0 时 所 指定 的 平面 工具 的 结果 的 平 [平面 的 距离 ]
测量 的 平面 , 成 ;
中 设 定 了 0.0 以 外 时 , 成 为 向 平面 的 法 线 方向 只 位 移 平面 的 距离 的 平面 。
结果 显示 模式
选择 在 执行 程序 时 将 测量 结果 显示 于 图 像 中 的 方式 。
无
什么 也 不 显示 。
-370 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)