3 维广域传感器抓持位置检出工具
工业 自动 化 专家 CAD2D3D.com
7. 命 令 行 工 具 B-83304CM/04
SN
工件
抓 取 深 度
XY 间隔
设 定 搜寻 抓 取 位 置 时 的 XY 间隔 〈 单 位 : mm) 。 [XY 间隔 ] 越 小 越 会 频繁 进行 搜寻 , 因 而 可 以 检 出 粗略 的 搜寻 中 被 忽
略 掉 的 抓 取 位 置 。 此 外 ,3 维 广 域 传感器 抓 持 位 置 检 出 工具 虽然 兼备 有 检测 抓 取 位 置 的 机 械 手 与 其 它 工件 的 干涉 之 功能 ,
但 是 该 检测 功能 的 精度 , 其 [XY 间隔 ] 越 小 越 高 。
但 是 , 检 出 所 需 的 时 间 一 旦 减 小 [XY 间隔 ] 就 会 急剧 增 大 , 因 而 要 在 求 取 检 出 时 间 和 输出 结果 平衡 的 同时 进行 调整 。
建议 设 定 值 是 2.0mm 一 4.0mm 左右 -
=
了 及 范围
设 定 搜寻 抓 取 位 置 时 的 了 范围 单位, 度 ) 。 在 工件 被 整齐 排列 时 等 希望 限制 抓 取 工 件 时 的 相位 (了 R) 时 , 请 调整 [R
范围 ] 。
及 间隔
设 定 搜寻 抓 取 位 置 时 的 及 间隔 单位, 度 ) 。
抓 取 范围 内 最 少 点 数
设 定 前 述 的 机 械 手 模型 的 抓 取 范 围 内 存在 的 3 维 点 数量 的 闭 值 。
重 登 检查 的 范
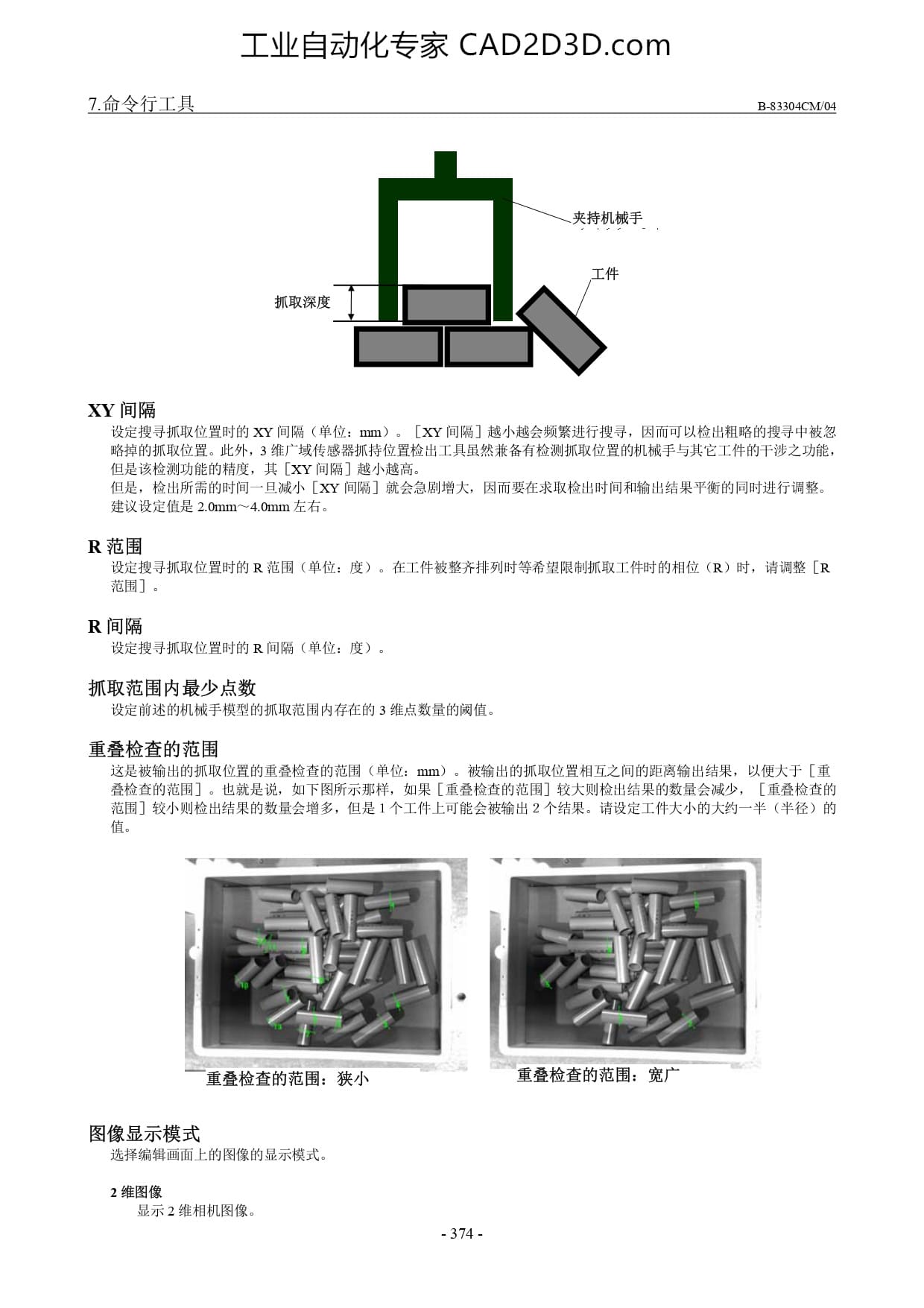
这 是 被 输出 的 抓 取 位 置 的 重 肥 检 查 的 范围 〈 单 位 , mm) 。 被 输出 的 抓 取 位 置 相互 之 间 的 距离 输出 结果 , 以 便 大 于 [ 重
释 检 查 的 范围 ] 。 也 就 是 说 , 如 下 图 所 示 那 样 , 如 果 [ 重 受 检 查 的 范围 ] 较 大 则 检 出 结果 的 数量 会 减少 ,【[ 重 登 检查 的
范围 ] 较 小 则 检 出 结果 的 数量 会 增多 , 但 是 1 个 工件 上 可 能 会 被 输出 2 个 结果 。 请 设 定 工件 大 小 的 大 约 一 半 〈 半 径 ) 的
值 。
人
倒 检 查 的 范围 ; 狭小 重 登 检查 的 范围 : 宽广
图 像 显 示 模 式
选择 编辑 画面 上 的 图 像 的 显示 模式 。
2 维 图 像
显示 2 维 相机 图 像 。
-374-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)