关于负载设定
工业 自动 化 专家 CAD2D3D.com
Bl 4. 安装 设备 到 机 器 人 上
机 器 人 的 X .
末端 执行 器
安装 面 中 心
重量 mkg)
x(em) ey
______ o
Iz (kefrom=s")
vi(em)|
o esf-om 的 和 | >)
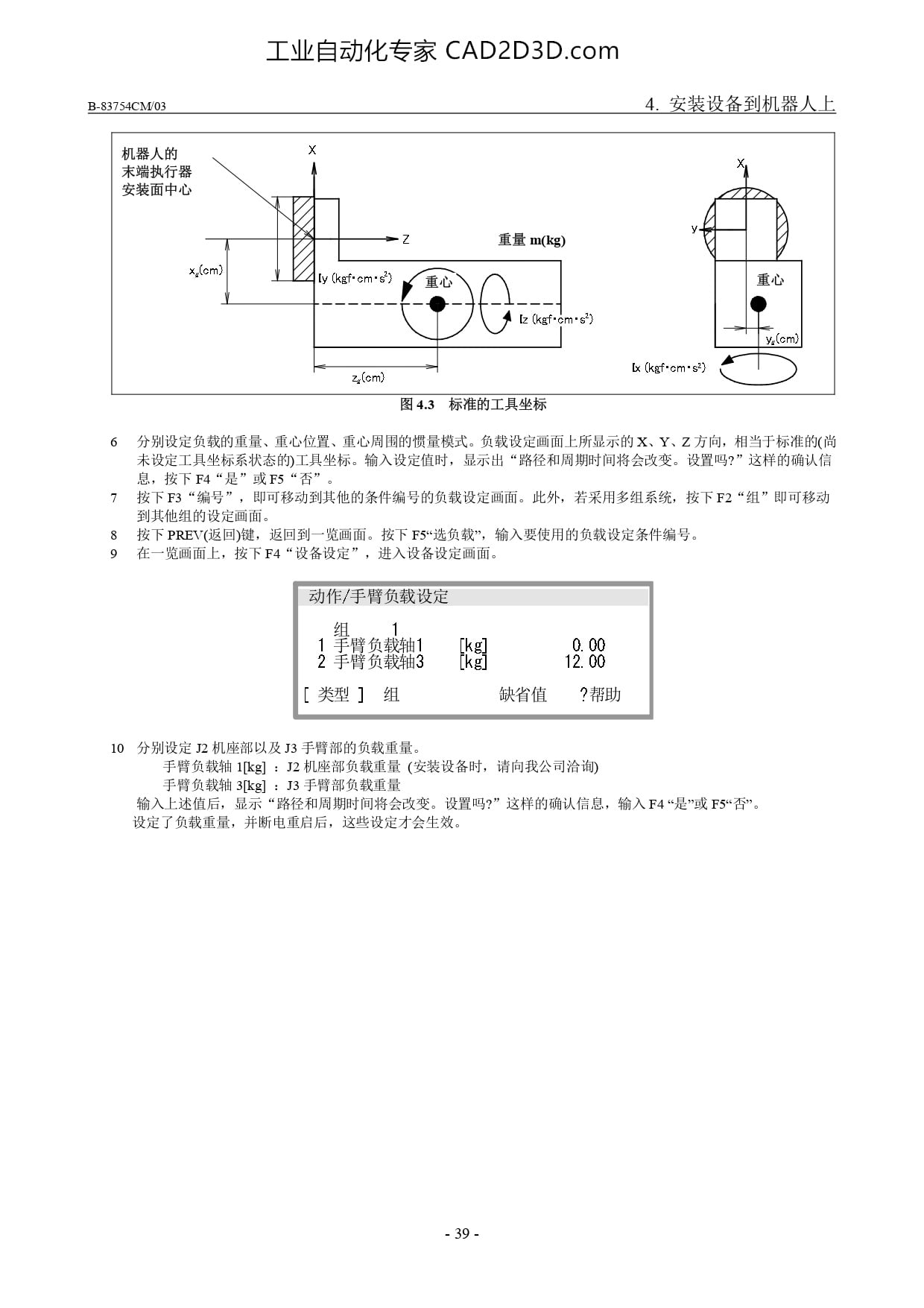
图 4.3 标准 的 工具 坐标
6 ”分别 设 定 负载 的 重量 、 重 心 位 置 、 重 心 周围 的 惯量 模式 。 负 载 设 定 画 面 上 所 显示 的 X、Y、Z 方 向, 相当 于 标准 的 ( 尚
未 设 定 工具 坐标 系 状 态 的 ) 工 具 坐 标 。 输 入 设 定 值 时 , 显 示 出 “路 径 和 周期 时 间 将 会 改变 。 设 置 吗 ?” 这 样 的 确认 信
息 , 按 下 F4“ 是 ”或 FE5“ 否 ”。
7 按 下 F3“ 编 号 ”, 即 可 移动 到 其 他 的 条 件 编号 的 负载 设 定 画面 。 此 外 , 若 采用 多 组 系统 , 按 下 F2“ 组 ” 即 可 移动
到 其 他 组 的 设 定 画面 。
8 按 下 PREV( 返 回 ) 键 , 返 回 到 一 览 画面 。 按 下 FS“ 选 负载 ", 和 输入 要 使 用 的 负载 设 定 条 件 编号 。
9 在 一 览 画面 上 , 按 下 F4“ 设 备 设 定 ”, 进 入 设备 设 定 画面 。
动作 /手臂 负载 设 定
组 1
1 PRt [ke] 0. 00
2 手 尼 负载 轴 3 kel 12. 00
[ 类 型 ] 组 缺 省 值 ?帮助
10 分 别 设 定 卫 机 座 部 以 及 J3 手臂 部 的 负载 重量 。
T G 1kg] ¢ 蕊 机 座 部 负载 重量 (安装 设备 时 , 请 向 我 公司 洽 询 )
手臂 负载 轴 3[kg] : J3 手臂 部 负载 重量
输入 上 述 值 后 , 显 示 “ 路 径 和 周期 时 间 将 会 改变 。 设 置 吗 ?” 这 样 的 确认 信息 , 输 入 F4 “是 "或 FS“ 否 "”-。
设 定 了 负载 重量 , 并 断 电 重启 后 , 这 些 设 定 才 会 生效 。
-39-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)