确认图像和检出结果
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 7. 命 令 行 工具
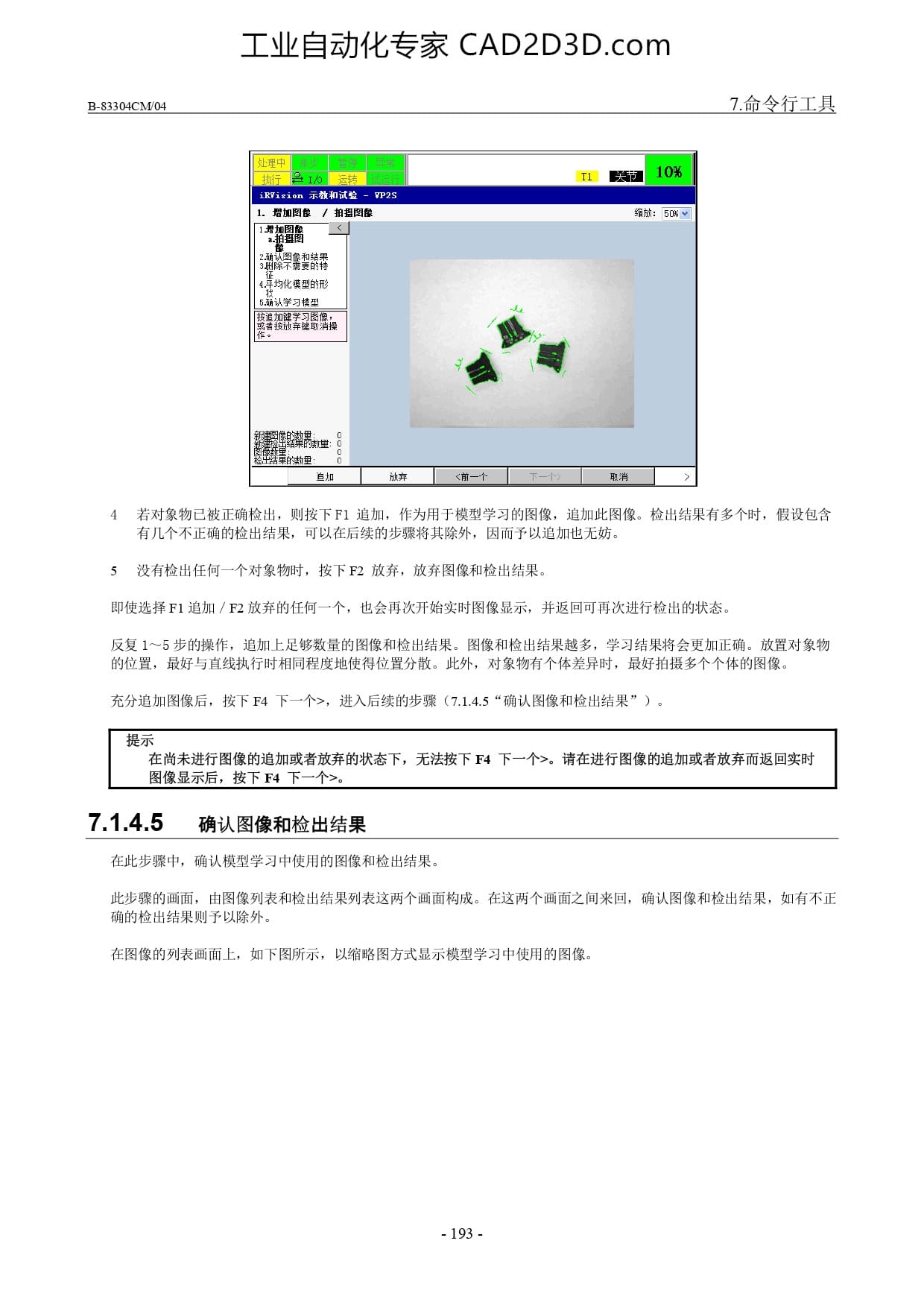
4 “车 对 象 物 已 被 正确 检 出 , 则 按 下 F1 追加 , 作
有 几 个 不 正确 的 检 出 结果 , 可 以 在 后 续 的 步骤
用 于 模型 学 习 的 图 像 , 追 加 此 图 像 。 检 出 结果 有 多 个 时 , 假 设 包含
除外 , 因 而 予以 追加 也 无 妨 。
5 ”没有 检 出 任何 一 个 对 象 物 时 , 按 下 F2 放弃 , 放 弃 图 像 和 检 出 结果
即使 选择 Fl 追加 / F2 放弃 的 任何 一 个 , 也 会 再 次 开始
图 像 显示 , 并 返回 可 再 次 进行 检 出 的 状态 。
反复 1 一 5 步 的 操作 , 追 加 上 足够 数量 的 图 像 和 检 出 结果 。 图 像 和 检 出 结果 越 多 , 结果 将 会 更 加 正确 。 放 置 对 象 物
的 位 置 , 最 好 与 直线 执行 时 相同 程度 地 使 得 位 置 分 散 。 此 外 , 对 旬 多 着 个 体 站 和 时 。 遇 折 摄 光 个 个 体 的 因 像 。
充分 追加 图 像 后 , 按 下 FE4 下 一 个 >, 进 入 后 续 的 步骤 〈7.1.4.5“ 确 认 图 像 和 检 出 结果 ”) 。
提示
在 尚未 进行 图 像 的 追加 或 者 放弃 的 状态 下 , 无 法 按 下 F4 下 一 个 >。 请 在 进行 图 像 的 追加 或 者 放弃 而 返回 实时
图 像 显示 后 , 按 下 F4 下 一 个 >。
7.1.4.5 。 确认 图 像 和 检 出 结果
在 此 步骤 中 , 确 认 横 型 学 习 中 使 用 的 图 像 和 检 出 结果
此 步骤 的 画面 , 由 图 像 列 表 和 检 出 结果 列表 这 两 个 画面 构成 。 在 这 两 个 画面 之 间 来 回 , 确 认 图 像 和 检 出 结果 , 如 有 不 正
确 的 检 出 结果 则 了 予以 除外 。
在 图 像 的 列表 画面 上 , 如 下 图 所 示 , 以 缩 略 图 方式 显示
习 中 使 用 的 图 像 。
-193 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)