基于DCS的可动范围限制
6. 变更 可 动 范围
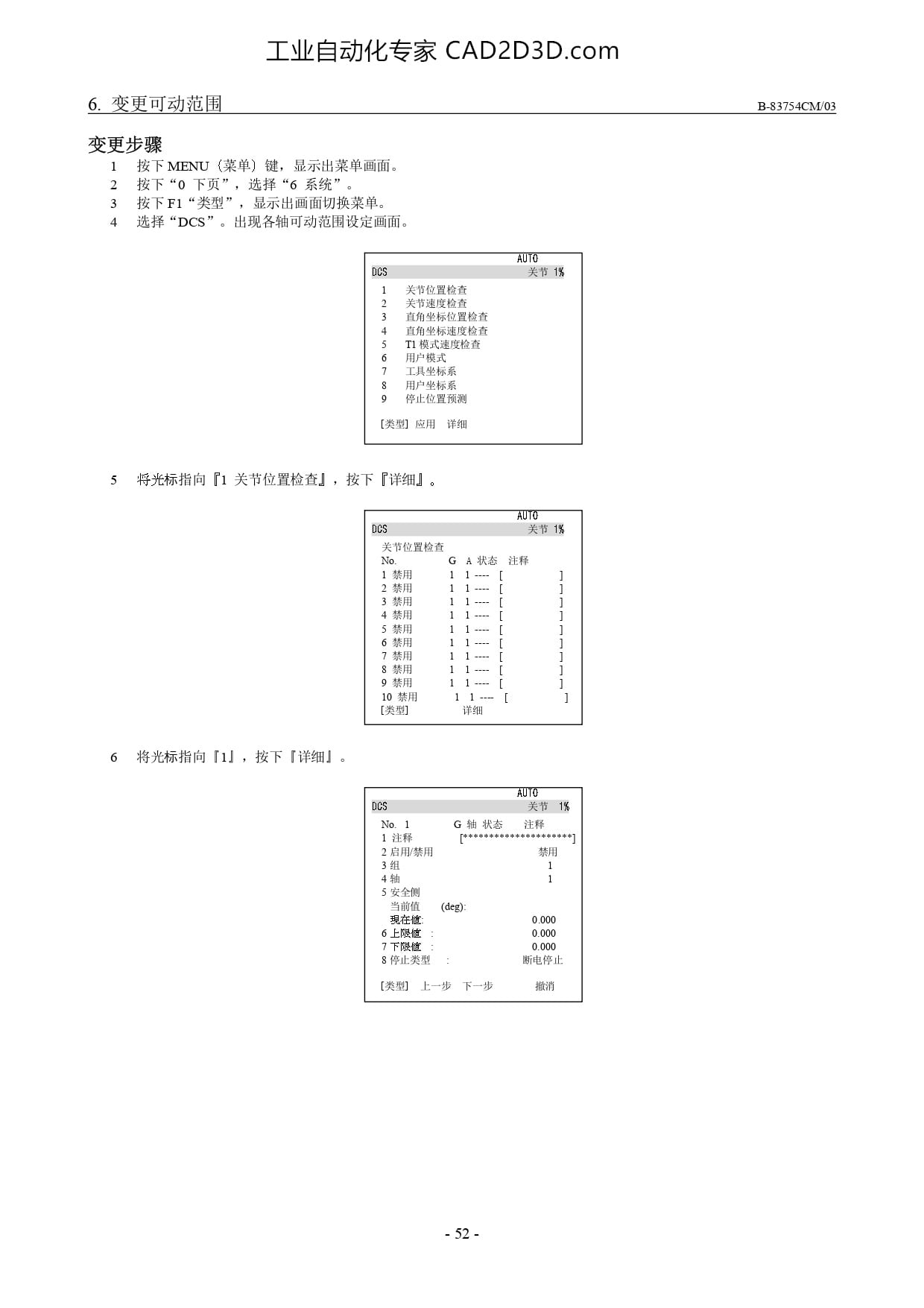
变更 步骤
1 按 下 MENU
单
工
=
) 键 , 显 示 出 菜单 画面 。
自动 化 专家 CAD2D3D.com
2 按 下 “0 下 页 ”, 选 择 “6 系统 ”。
3 按 下 F1“ 类 型 ”, 显 示 出 画面 切换 菜单 。
4 选择 “DCS”。 出 现 各 轴 可 动 范围 设 定 画面 。
AUTO
06§ 关节 1%
1 。 关节 位 置 检查
2 关节 速度 检
3
3
5
6 用户 模 式
7 。 工具 坐标 系
8 ”用户 坐 标 系
9 。 停止 位 置 预测
[类 到 应 用 “详细
5 ”和 将 光标 指向 『1 关节 位 置 检查 」, 按 下 『 详 细 」 。
AT
Des 关节 1%
关节 位 置 检查
注释
[ ]
[ 1
[ 1
[ 1
[ 1
[ 1
[ 1
[ 1
[ 1
1
6 ”将 光标 指向 『1」 , 按 下 『 详 细 】」 。
DT
Des £t 1%
No. 1 G ke kR
1 注释 e ]
2 启用 / 菊 用 禁用
3 组 1
4 4 1
5 安全 全
当前 值 。 (deg)
现在 信 ; 0.000
6 ERE 0.000
7 TIRE 0.000
8 停止 类 Wi
[类 到 “上 一 步 下 一 步 撤消
52-
B-83754CM/03
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)