基于DCS的可动范围限制
T
=
自动 化 专家 CAD2D3D.com
B-83754CM/03 6. 变更 可 动 范围
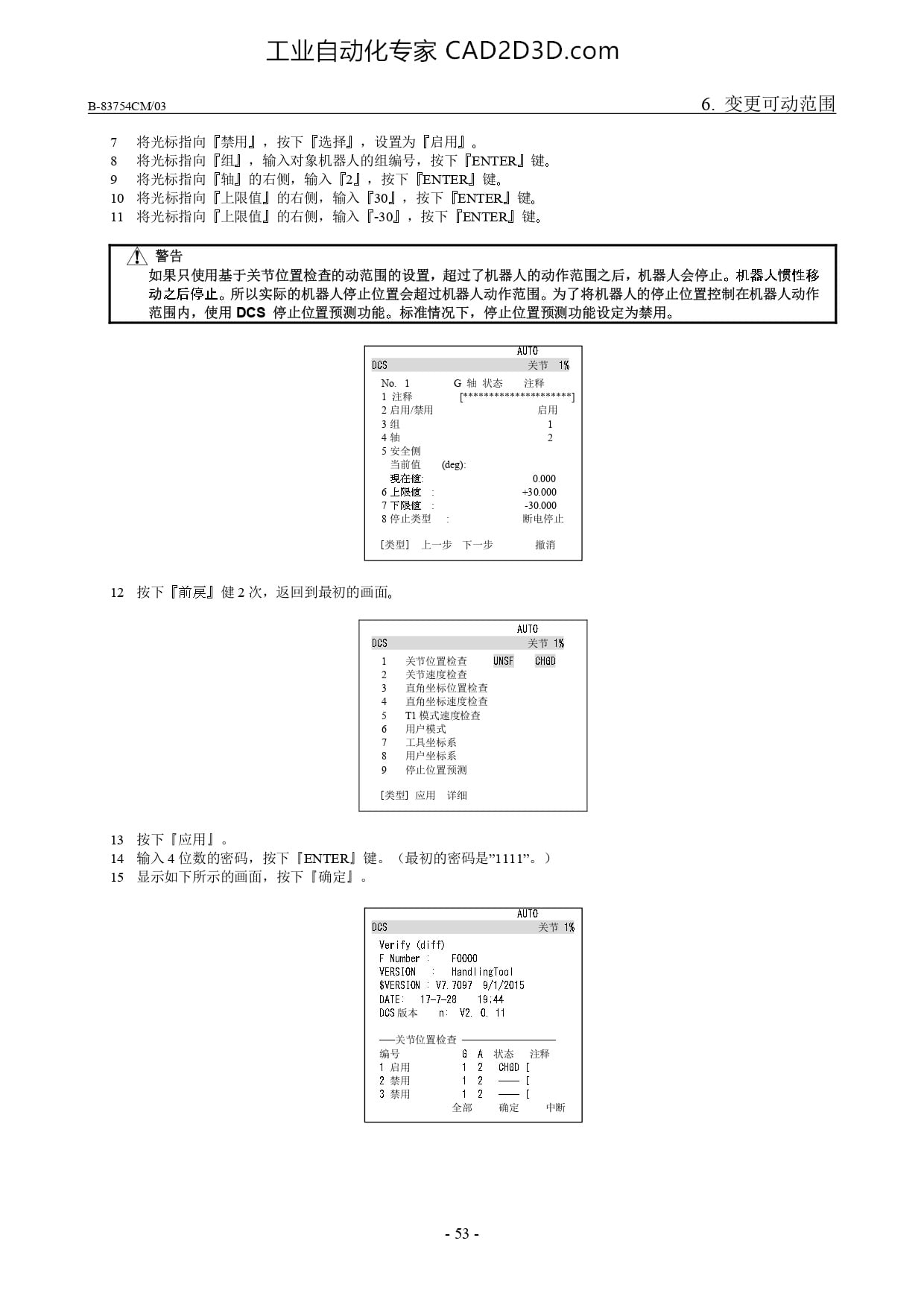
7 “将 光标 指向 『 禁 用 」, 按 下 『 选 择 」, 设 置 为 『 启 用 了 。
示 指 向 『 组 」, 输 入 对 象 机 器 人 的 组 编号 , 按 下 『ENTER 键 。
标 指向 『 轴 的 右 侧 , 输 入 24 , 按 下 『ENTERJ 键 。
10 将 光标 指向 『 上 限 值 」 的 右 侧 , 输 入 『304 , 按 下 fENTER」 键 。
11 将 光标 指向 『 上 限 值 」 的 右 侧 , 输 入 『-304 , 按 下 『ENTERJ 键 。
如 果 只 使 用 基于 关节 位 置 检查 的 动 范围 的 设置 , 超 过 了 机 器 人 的 动作 范围 之 后 , 机 器 人 会 停止 。 机 器 人 惯性 移
动 之 后 停止 。 所 以 实际 的 机 器 人 停止 位 置 会 超过 机 器 人 动作 范围 。 为 了 将 机 器 人 的 停止 位 置 控制 在 机 器 人 动作
范围 内 , 使 用 DCS 停止 位 置 预测 功能 。 标 准 情况 下 , 停 止 位 置 预 测 功能 设 定 为 禁用 。
L
065 关节 协
No 1 G 轴 状态 。 注释
1 注释 [eeeerereerevreereere]
2 BRI 启用
3 组 1
44 2
5 安全 侧
当前 值 。 (de 人
现在 依 ; 0000
6 上限 信 -30000
7 下 限 信 -30000
8 停止 类 型 i1
[类 型 ] 上 一 步 下 一 步 撤消
12 按 下 『 前 奈 」 健 2 次 , 返 回 到 最 初 的 画面 。
ATO
065 关节 司
US CHaD
[P
13 按 下 『 应 用 1 。
14 输入 4 位 数 的 密码 , 按 下 『ENTER4 键 。 (最 初 的 密码 是 ?1111"。)
15 显示 如 下 所 示 的 画面 , 按 下 『 确 定 」 。
WUTT
ocs KW 1%
Verify (diff)
F_ Number F0000
VERSION HandlingTool
SNERSION : V7. 7097 9/1/2015
DATE: 17-7-28 18,44
D0S 版 本 站 她 和 1
一 关节 位 置 检查
6 帮 状态 注释
1 1 2 chen [
1 2
1 2
2 禁用
3 禁用
—ul
—],
全 部 确定 T
-53 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)