基于机械式可变制动器的可动范围的变更
工业 自动 化 专家 CAD2D3D.com
6. 变更 可 动 范围 B-83754CM/03
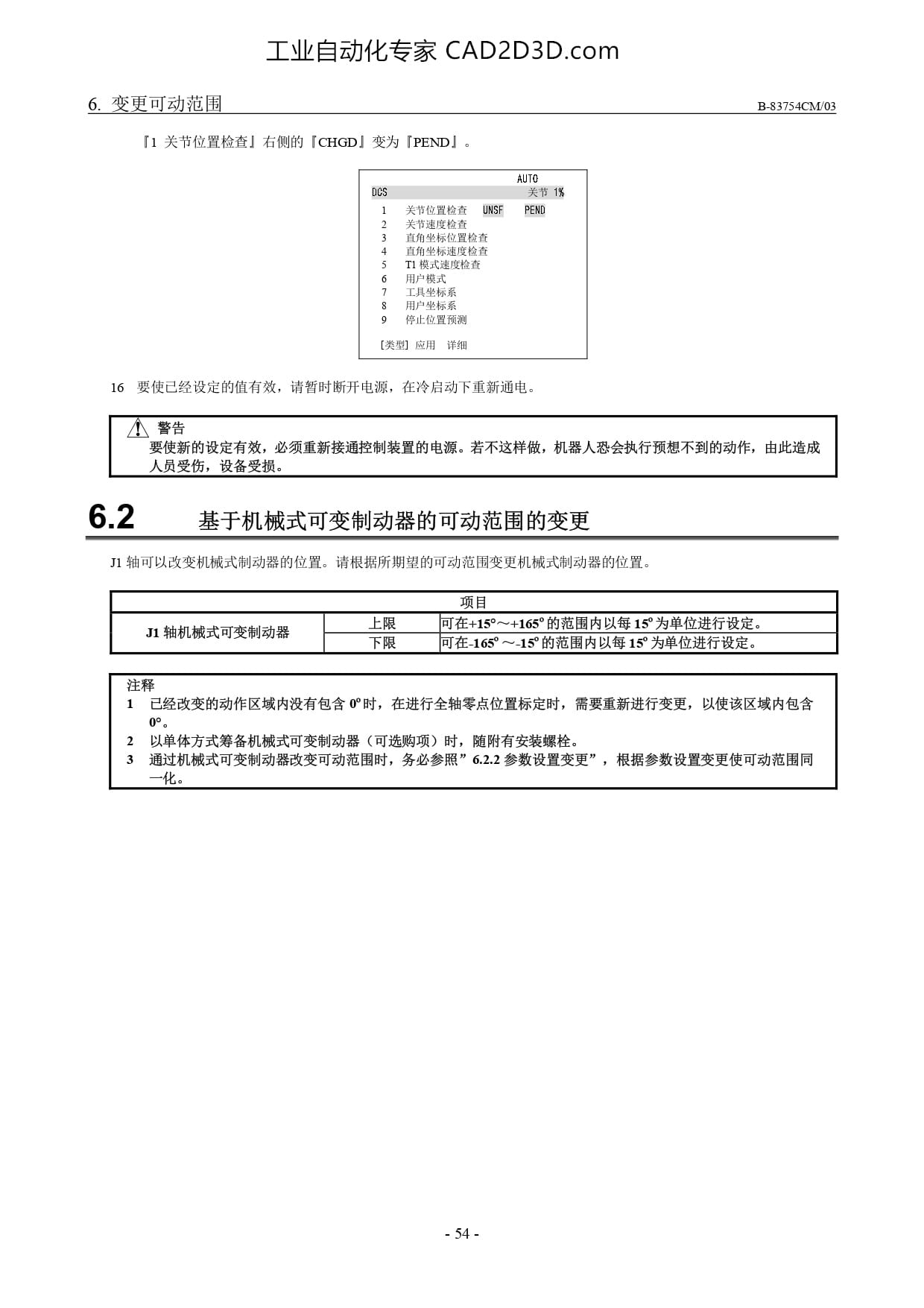
T1 关节 位 置 检查 】」 40U TcHGDI %% TPEND] .
<
AUTO
068 关节 ]
1 # UNSF PEND
2 i
3
3
5
6
7
8
9
[类 型 ] 应 用 “详细
16 要 使 已 经 设 定 的 值 有 效 , 请 暂时 断 开 电源 , 在 冷 启 动 下 重新 通电 。
AN\ 警告
要 使 新 的 设 定 有 效 , 必 须 重新 接 通 控制 装置 的 电源 。 若 不 这 样 做 , 机 器 人 丽 会 执行 预想 不 到 的 动作 , 由 此 造成
人 员 受 伤 , 设 备 受 损 。
6.2 基于 机 械 式 可 变 制动器 的 可 动 范围 的 变更
了 习 轴 可 以 改变 机 械 式 制动器 的 位 置 。 请 根据 所 期 望 的 可 动 范围 变更 机 械 式 制动器 的 位 置 。
癌 在 +1s? 一 +165? 的 范围 内 以 每 1S" 为 单位 进行 设 定 。
司 在 -16s" 一 -1s" 的 范围 内 以 每 1S" 为 单位 进行 设 定 。
释
已 经 改变 的 动作 区 域内 没有 包含 时, 在 进行 全 轴 零 点 位 置 标 定时 , 需 要 重新 进行 变更 , 以 使 该 区 域内 包含
0
ul\awvzc%@mmfmwfimas 〈 可 选 购 项 》 时 , 随 附 有 安装 螺栓 。
通过 机 械 式 可 变 制动器 改变 可 动 范围 时 , 务 必 人 参照 ”6.2.2 参数 设置 变更 ”, 根 据 参数 设置 变更 使 可 动 范围 同
一 化 。
-54-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)