参数的设置变更
工业 自动 化 专家 CAD2D3D.com
<
6. 变更 可 动 范围 B-83754CM/03
6.2.2 参数 的 设置 变更
变更 步 又
1 按 下 MENU 《菜单 ) 键 , 显 示 出 菜
2 按 下 “0 下 页 ”, 选 择 “6 系统 ”。
3 按 下 F1“ 类 显示 出 画面 切换 菜单 。
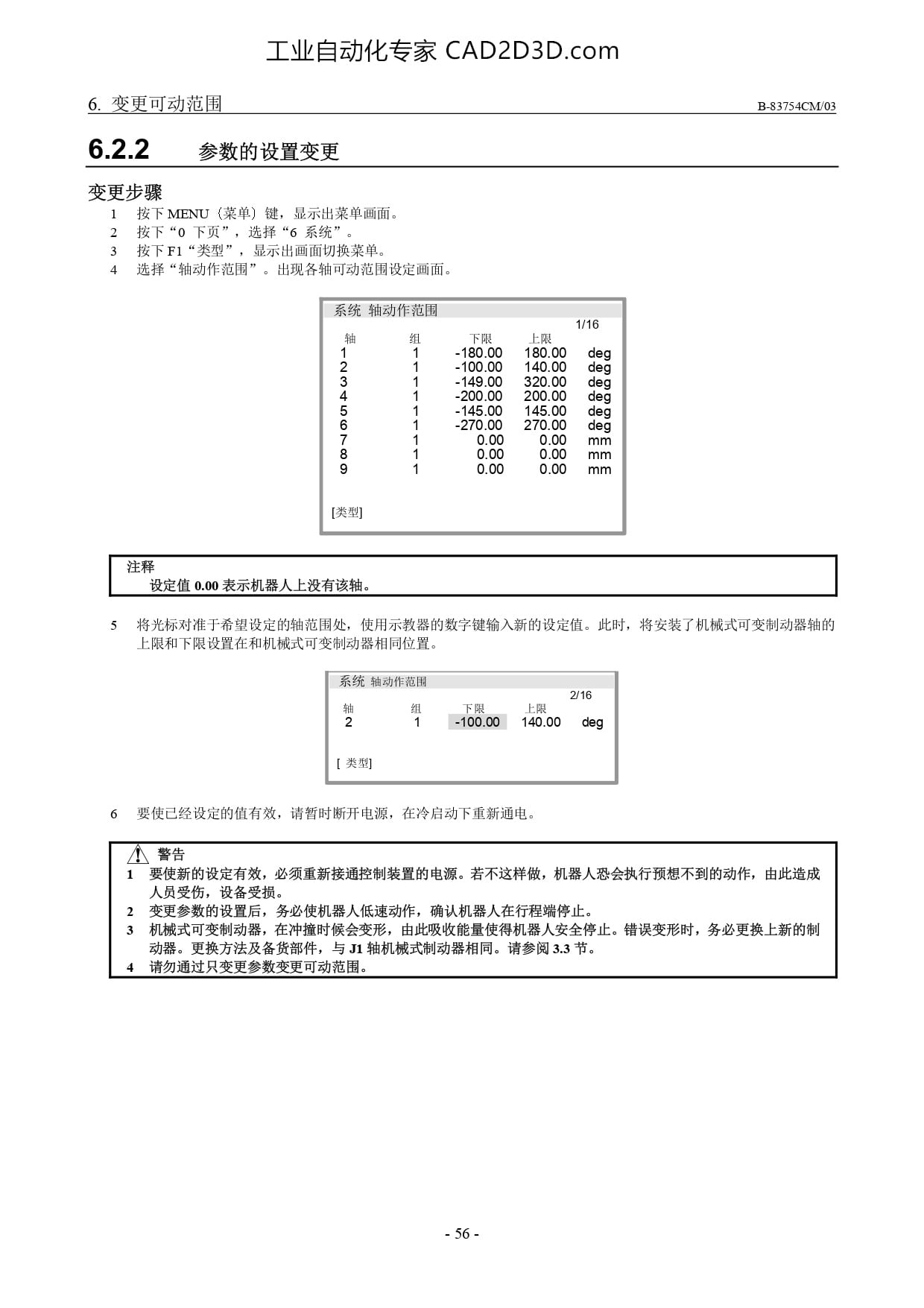
4 选择“ 轴 动作 范围 ”。 出 现 各 轴 可 动 范围 设 定 画面 。
系统 轴 动 作 范围
组 下 限 上 限
1 -180.00 180.00 deg
1 -100.00 140.00 deg
1 -149.00 320.00 deg
1 -200.00 200.00 deg
] -145.00 145.00 deg
1
1
1
116
-270.00 270.00 deg
0.00 0.00 mm
0.00 0.00 ”mm
0.00 0.00 mm
5 将 光标 对 准 于 希望 设 定 的 轴 范 围 处 , 使 用 示 教 器 的 数字 键 输入 新 的 设 定 值 。 此 时 , 将 安装 了 机 械 式 可 变 制动器 轴 的
上 限 和 下 限 设置 在 和 机 械 式 可 变 制动器 相同 位 置 。
系统 轴 动 作 范围
轴 组 下 限 上 限
2 1 -5100.00 ”140.00 ”deg
[ 类 型 ]
6 ”要 使 已 经 设 定 的 值 有 效 , 请 暂时 断 开 电 源 , 在 冷 启 动 下 重新 通电 。
AN\ 警告
要 使 新 的 设 定 有 效 , 必 须 重新 接 通 控制 装置 的 电源 。 若 不 这 样 做 , 机 器 人 丽 会 执行 预想 不 到 的 动作 , 由 此 造成
人 员 受伤 , 设 备 受 损 。
变更 参数 的 设置 后 , 务 必 使 机 器 人 低速 动作 , 确 认 机 器 人 在 行程 端 停止 。
机 械 式 可 变 制动器 , 在 冲撞 时 候 会 变形 , 由 此 吸收 能 量 使 得 机 器 人 安全 停止 。 错 误 变形 时 , 务 必 更 换 上 新 的 制
动 器 。 更 换 方法 及 备货 部 件 , 与 也 轴 机 械 式 制动器 相同 。 请 参阅 3.3 节 。
请 勿 通过 只 变更 参数 变更 可 动 范围 。
-56-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)