摆动和上下运动组合装卸机构
摆动 和 上 下 运动 组 合 装卸 机 构
SOLI SOL2
气缸 全
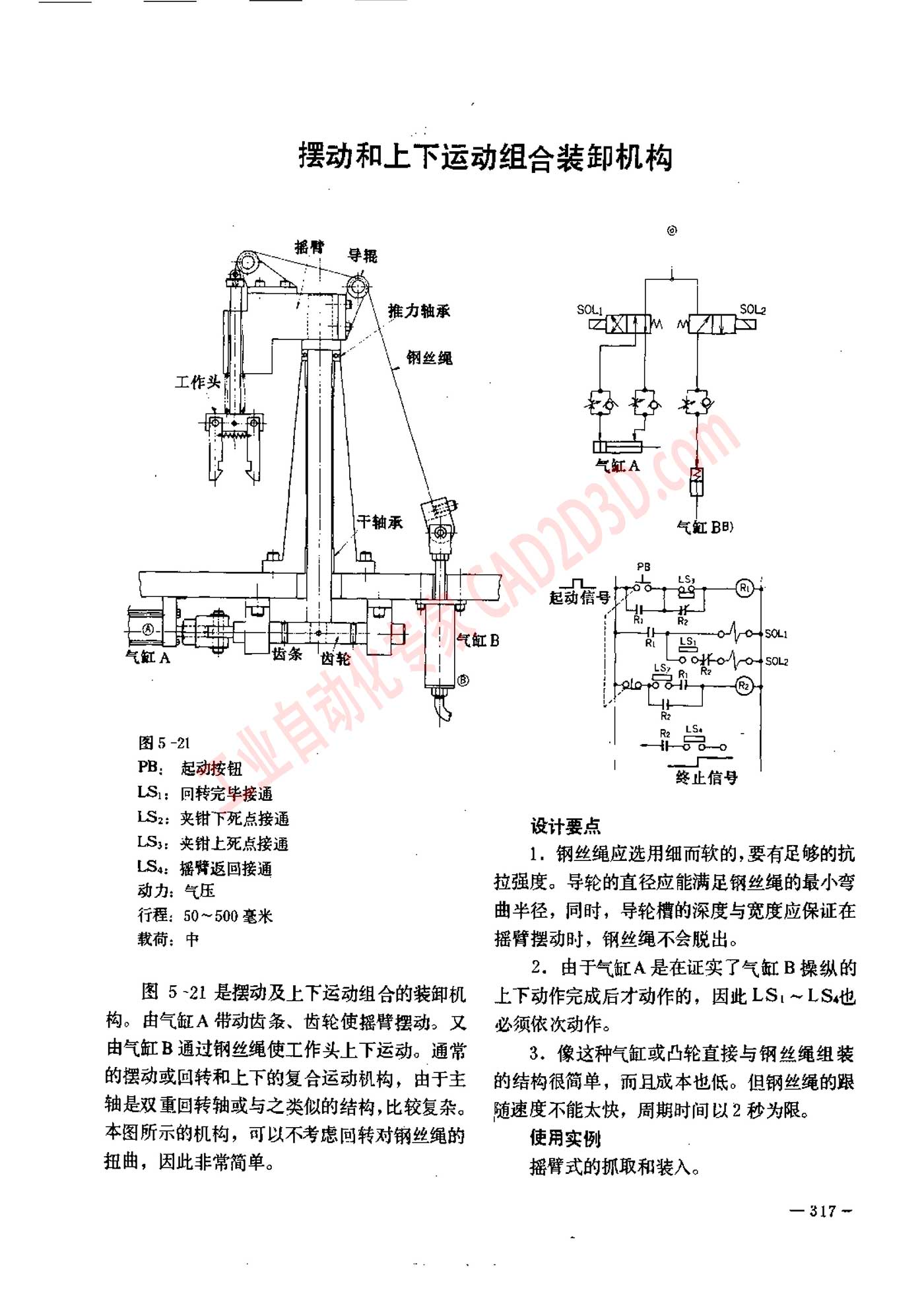
图 5-21
PB. 起 动 按 钮
LS:, 回 转 完毕 接 通
LS::, 夹 钳 下 死 点 接 通
LS:: 夹 钳 上 死 点 接 通
LS. BWEEEE
动力 : 气压
行程 : 80 一 500 毫米
载荷 :中
图 5 `21 是 摆动 及 上 下 运动 组 合 的 装卸 机
构 。 由 气 纪 A 带动 此 条 、 齿 轮 使 扬 臂 摆动 。 又
由 气缸 B 通过 钢丝 绳 使 工作 头 上 下 运动 。 通 常
的 摆动 或 回转 和 上 下 的 复合 运动 机 构 , 由 于 主
轴 是 双重 回转 轴 或 与 之 类 似 的 结 梅 ,比较 复杂 。
本 图 所 示 的 机 构 , 可 以 不 考虑 回转 对 钢丝 绳 的
扭曲 , 因 此 非常 简单 。
1, 钢丝 强 应 选用 细 而 软 的 ,要 有 足够 的 抗
拉 强 度 。 导 轮 的 直径 应 能 满足 钢丝 绳 的 最 小 灾
曲 半径 , 同 时 , 导 轮 覃 的 深度 与 宽度 应 保证 在
扬 竺 殷 动 时 , 钢 丝 强 不 会 脱出 。
2 由 于 气缸 A 是 在 证 实 了 气缸 B 操 纵 的
上 下 动作 完成 后 才 动 作 的 , 因 此 LS, 一 LS 也
必须 依次 动作 。
3. 像 这 种 气缸 或 凸轮 直接 与 钢丝 强 组 装
的 结构 很 简单 , 而 且 成 本 也 低 。 但 钢丝 绳 的 跟
随 速度 不 能 太 快 , 周 期 时 间 以 2 秘 为 限 。
使 用 实例 .
据 管 式 的 抓 取 和 装 入 。
一 317 一
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)