散堆取出(全体探索)
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 6. 视 觉 程 序
检 出 结果 表
显示 如 下 值 。
XY,z
这 是 检 出 的 工件
点 的 坐标 值 〈 单 位 : mm) 。
表示 将 相机 与 检 出 的 工件 连接 起 来 的 视线 的 斜 度 〈 单 位 : 度 ) 。
这 是 检 出 的 工件 绕 着 乙 轴 的 旋转 角度 〈 单 位 : 度 ) 。
这 是 检 出 的 工件 的 模型 ID 。
这 是 检 出 的 工件 的 评分 。
这 是 检 出 的 工件 的 大 小 。
这 是 检 出 的 工件 的 对 比 度 。
这 是 检 出 的 工件 的 失真 〈 单 位 :像素 ) 。
这 是 取出 检 出 的 工件 的 优先 级 。
提示
在 尚未 设 定 基准 面 乙 向 高 度 和 基准 尺寸 的 状态 下 进行 检 出 试验 时 , 由 于 无 法 计算 筷 Z W, P, R 的 值 而 显示
ErEEEEEE
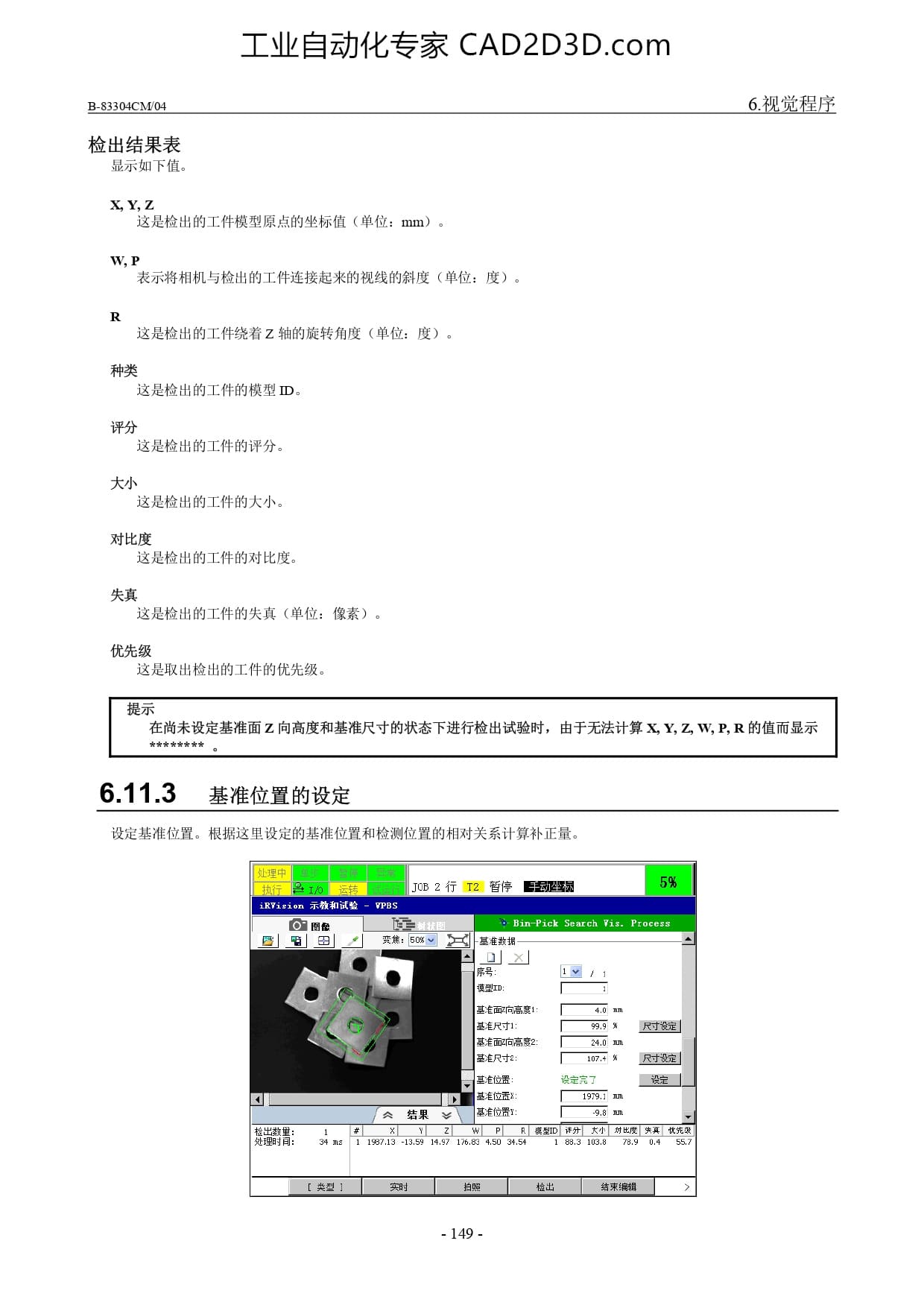
6.11.3 ”基准 位 置 的 设 定
设 定 基准 位 置 。 根 据 这 里 设 定 的 基准 位 置 和 检测 位 置 的 相对 关系 计算 补正 量 。
12
=]
T m
[ im <
FEnE: 1 [#] RISK WU 二
处 理 时 间 : 34 ms 1 1987,13 -13,59 14,97 176,83 和 50 34,54 1 86.3 1038 789 04 557
[ 类 型 1 实时 拍照 桩 出 革 束 编辑 >
-149 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)