相机基准2 维补正
工业 自动 化 专家 CAD2D3D.com
6. 视 觉 程序 B-83304CM/04
6.17.3 ”基准 位 置 的 设 定
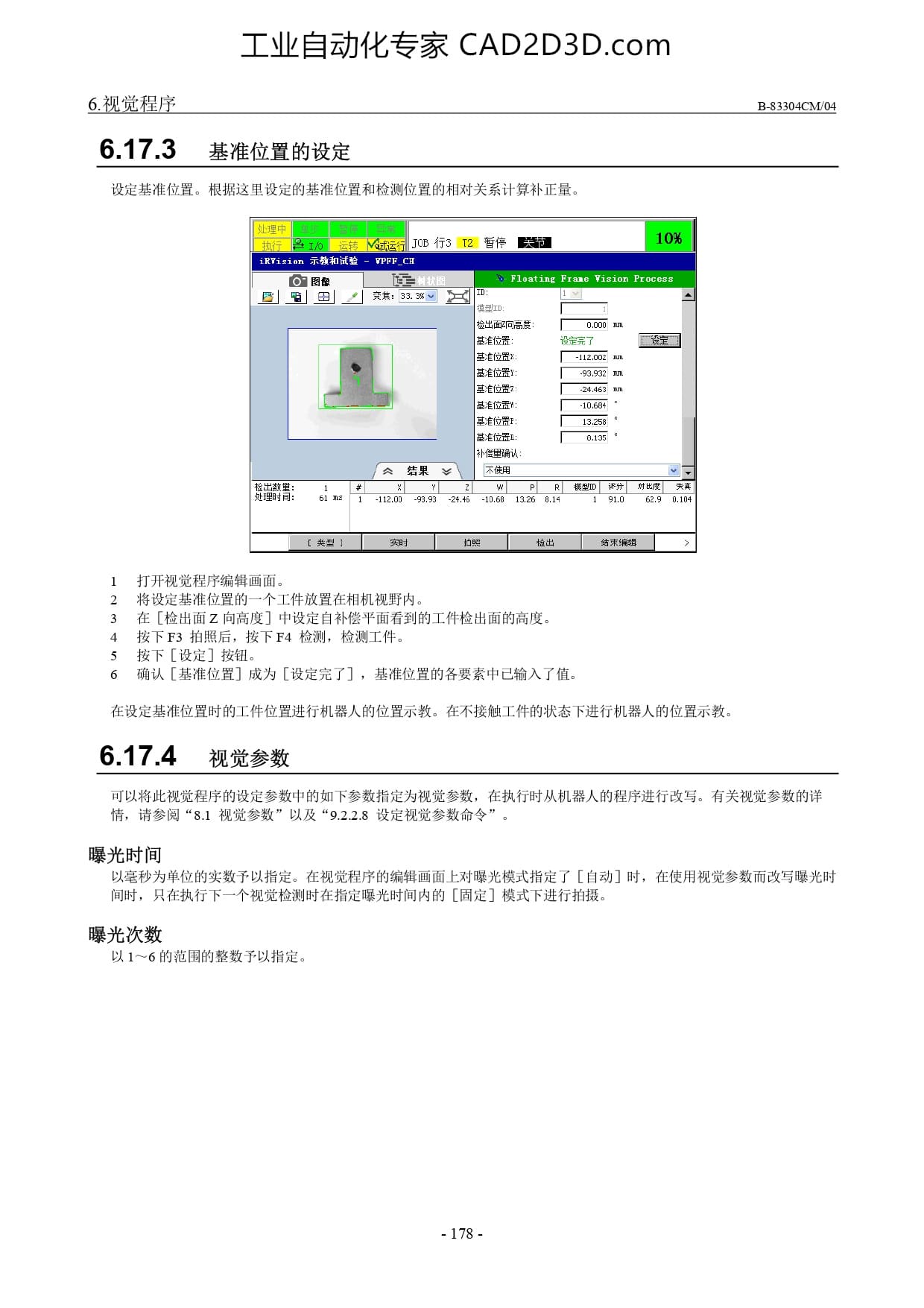
设 定 基准 位 置 。 根 据 这 里 设 定 的 基准 位 置 和 检测 位 置 的 相对 关系 计算 补正 量 。
&
S
— BT BERT
=i [ iizonz w
EEuE: 93532 am
=t [ zeder =
和 位 而 1 6
ZEfE 1z *
2 o *
补 信里 确认
[~ %R v\ | F#E s
REME: 1 [ #] s ] z] w[ P r| &&D[ #n] mem| %K
RBRIE: elms | 1 -200 993 2045 068 1326 6% 90 e2d o104
[类 到 ] 实时 的 由 性 出 SR >
打开 视觉 程序 编辑 画面 。
将 设 定 基准 位 置 的 一 个 工件 放置 在 相机 视野 内 。
在 [ 检 出 面 Z 向 高 度 ] 中 设 定 自 补 偿 平面 看 到 的 工件 检 出 面 的 高 度
按 下 F3 拍照 后 , 按 下 F4 检测 , 检 测 工件 。
按 下 [ 设 定 ] 按钮 。
确认 [基准 位 置 ] 成 为 【 设 定 完了 ] , 基 准 位 置 的 各 要 素 中 已 输入 了 值 。
oW
在 设 定 基准 位 置 时 的 工件 位 置 进行 机 器 人 的 位 置 示 教 。 在 不 接触 工件 的 状态 下 进行 机 器 人 的 位 置 示 教 。
6.17.4 ”视觉 参数
可 以 将 此 视觉 程序
情 , 请 参阅 “8.1 视
数 中 的 如 下 参数 指
数 ”以 及 “9.2.2.8 设
, 在 执行 时 从 机 器 人 的 程序 进行 改写 写 。 有 关 视 觉 参 数 的 详
低
2
i
曝光 时 间
以 毫秒 为 程序 的 编辑 画面 上 对 曝光 模式 指定 了 [自动 ] 时 , 在 使 用 视觉 参数 而 改写 曝光 时
间 时 , 只 曝光 时 间 内 的 [固定 ] 模式 下 进行 拍摄 。
曝光 次 数
以 1 一 6 的 范围 的 整数 子 以 指定 。
-178 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)