命令行工具 模型学习
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 7. 命 令 行 工具
扁平 率
这 是 已 检 出 的 图 形 的 扁平 率 〈 单 位 ,%) 。 只 在 勾 选 了 遍
扁平 方向
这 是 已 检 出 的 图 形 的 扁平 方向 〈 单 位 : 度 ) 。 只 在 勾 选 了 扁平 率 检索 时 才 会 显示 。
7.1.4 ”模型 学 习
以 优化 。
征 被 删除
状 相对 所 检 出 的 工件 形状 的 偏差 被 平均 化 。
。 模型 图 形 的 形
通过 优化 模型 图 形 , 评 分 上 升 , 相 应 地 提升 评分 的 阔 值 , 因 而 可 以 得 到 抑制 错误 检 出 或 缩短 处 理 时 间 的 效果 。
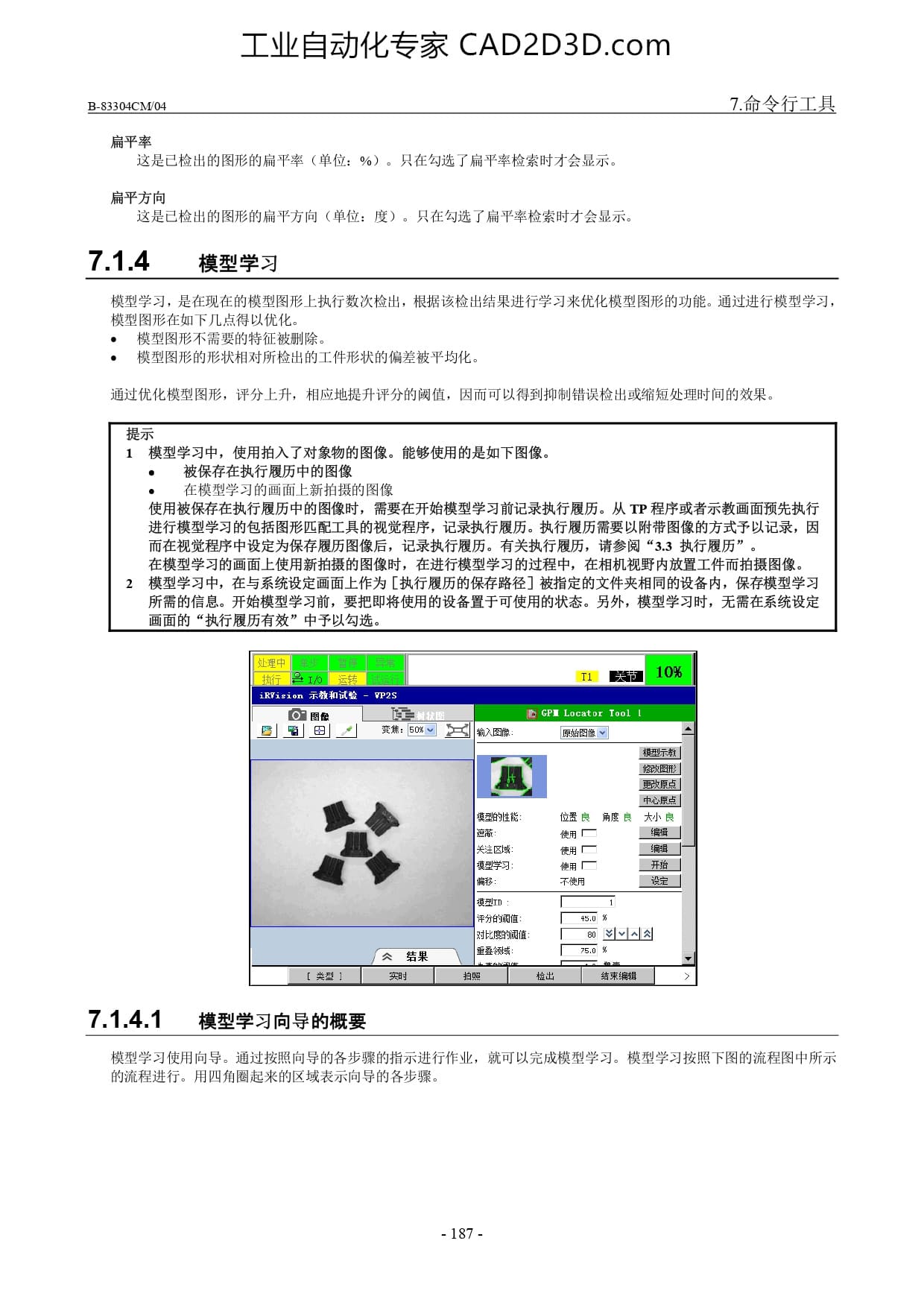
1 模型 学 习 中 , 使 用 拍 入 了 对 象 物 的 图 像 。 能 够 使 用 的 是 如 下 图 像 。
。 ”被 保存 在 执行 履历 中 的 图 像
。 ”在 模型 学 习 的 画面 上 新 拍摄 的 图 像
使 用 被 保存 在 执行 履历 中 的 图 像 时 , 需 要 在 开始 模型 学 习 前 记录 执行 履历 。 从 TP 程序 或 者 示 教 画面 预先 执行
进行 模型 学 习 的 包括 图 形 匹 配 工具 的 视觉 程序 , 记 录 执 行 履历 。 执 行 履历 需要 以 附带 图 像 的 方式 予以 记录 ,
而 在 视觉 程序 中 设 定 为 保存 履历 图 像 后 , 记 录 执 行 履历 。 有 关 执 行 履历 , 请 参阅 “3.3 执行 履历 ”。
在 模型 学 习 的 画面 上 使 用 新 拍摄 的 图 像 时 , 在 进行 模型 学 习 的 过 程 中 , 在 相机 视野 内 放置 工件 而 拍摄 图 像 。
模型 学 习 中 , 在 与 系统 设 定 画面 上 作为 [执行 履历 的 保存 路 径 ] 被 指定 的 文件 夹 相 同 的 设备 内 , 保 存 模型 学 习
所 需 的 信息 。 开 始 模型 学 习 前 , 要 把 即将 使 用 的 设备 置 于 可 使 用 的 状态 。 另 外 , 模 型 学 习 时 , 无 需 在 系统 设 定
画面 的 “执行 履历 有 效 ” 中 予以 勾 选 。
的 性 能 位 置 良 角度 良
- 使 用 站
sz 使 用 [一
) 使 用 [
L2 TR [
am 1
| e w4
bR 本 过 >
| 7o ¥
i
7.1.4.1 ”模型 学 习 向 导 的 概要
模型 学 习 使 用 向 导 。 通过
的 流程 进行 。 用 四 角 圈 起
向 导 的 各 步骤 的 指示 进行 作业 , 就 可 以 完成 模型 学 习 。 模 型 学 习 按照 下 图 的 流程 图 中 所 示
导 的 各 步骤 。
-187 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)