使用履历图像进行试验
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 3. 基 本 操作
品 国 cPM Locator Tool 1
国 Eistogran Tool 1
[=} [ GPN Locator Tool 2
四 下 stogran Tool 2
@
GPM Locator Tool 1
- WMl Histogran Tool 1
[=} @GN Locator Tool 2
i @ Edge Pair Locator Tool 1
(b)
根据 视觉 程序 的 种 类 , 除 了 按照 计 测 值 的 大 小 来 排序 外 , 还 可 以 选择 如 下 的 排序 方法 。 要 选择 如 下 的 排序 方法 , 在 [ 排
序 基准 ] 中 选择 [视觉 处 理 等 级 ] 。
最 小 路 径
试图 连续 取出 找到 的 对 象 物 时 , 以 使 机 器 人 的 XY 平面 内 的 移动 距离 成 为 最 小 的 方式 进行 排序 。 在 使 用 取 多 个 的 机
械 手 , 一 并 取出 找到 的 所 有 对 象 物 时 有 效 。 进 行 排序 时 , 不 考虑 个 别 对 象 物 的 检测 角度 。
最 小 路 径 角度
试图 连续 取出 找到 的 对 象 物 时, 以 使 机 器 人 的 XY 平面 内 的 移动 距离 和 及 旋转 量 成 为 最 小 的 方式 进行 排序 。 有 关 旋
转角 度 , 假 设 180 度 的 旋转 相当 于 从 图 像 上 的 左上 角 到 右 下 角 的 平行 移动 而 进行 换算 。 在 使 用 取 多 个 的 机 械 手 , 一
并 取出 找到 的 所 有 对 象 物 时 有 效 。
3.7.17 。 使 用 履历 图 像 进 行 试验
可 以 在 生产 线 运行 中 使 用 作为 履历 图 像 而 保存 的 图 像 , 进 行 视觉 程序 和 检测 工具 的 试验 。 有 助 于 在 变更 检测 工具 的 参数
等 情况 下 , 确 认 过 去 的 图 像 是否 有 问题 。 此 外 , 不 仅 限于 图 像 , 警 如 只 要 是 固定 于 机 器 人 的 相机 , 有 具有 拍摄 该 图 像 时 的
相机 之 机 器 人 的 位 置信 息 等 也 被 同时 恢复 , 因 而 会 包括 机 器 人 的 位 置 数据 而 再 现 生产 线 运行 时 的 状况 。 有 关 有 履历 图 像 的
保存 方法 , 请 参阅 “3.3 执行 履历 ”。
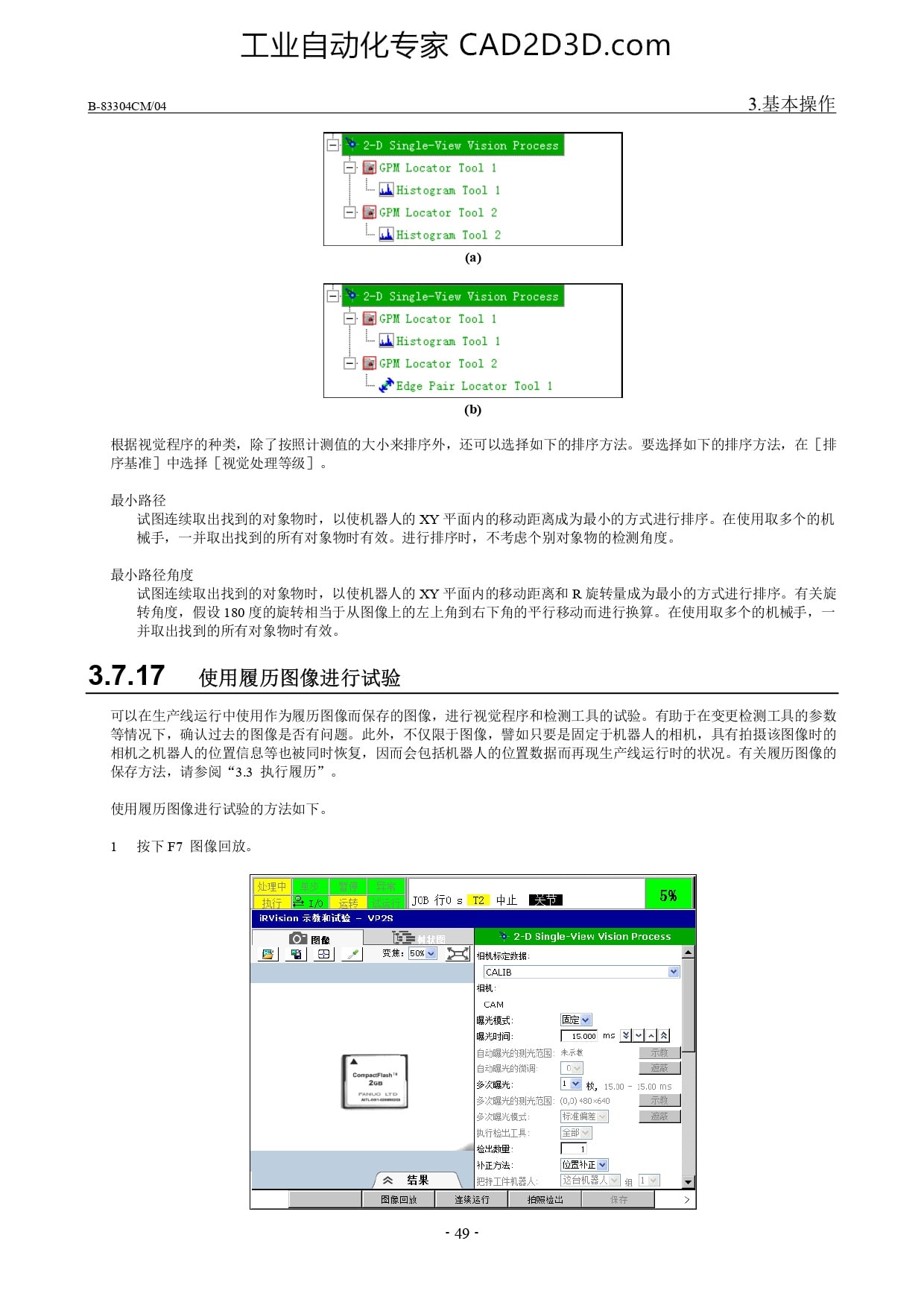
使 用 履历 图 像 进行 试 验 的 方法 如 下 。
1 按 下 F7 图 像 回 放 。
| J0B {70 s T2 中 上
T e 2-D single-view vision process
加 | 再 | 田 | | mR ooy 5w
[E=v
o we
e
-
[ 4, 1500~
@0 060
[E )
区 本
T
s [BEHE v
] 会 结果 把 持 工件 机 器 人 : EENEAN] |
EEE SR JapE
- 49 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)