散堆取出(全体探索)
工业 自动 化 专家 CAD2D3D.com
和 视觉 程序
1 在 下 拉 框 中 , 选 择 希望 删除 的 基准 数据 。
2 按 下 X 按钮 。
3 显示 确认 是 否 删除 的 消息 , 按 下 F4 确定 。
寄存 器 编号
[工件 的 高 度 ] 中 选择 了 【使 用 指定 寄存 器 的 值 ] 时 使 用 。 指 定 存储 有 工件 高 度 的 寄存 器 编号 。
基准 面 忆 向 高 度 和 基准 尺寸 的 设 定
在 [工件 的 高 度 ] 中 选择 了 [从 工件 的 尺寸 计算 ] 时 使 用 。 设 定 工件 人
只 堆 王 1 层 工件 , 使 TCP 全 二 二 休 吝 训 。 将 此 高 度 信息 输入 到 [基准 面 乙 向 高 度 1] 中 。
在 按 下 F3
息 输 入 到 【基准 面 忆 向 高 度 2] 中 。
人 wb
Heftn 2
在 按 下 E3 拍照 后 , , 按 下 [尺寸 设 定 ] 按钮 而 设 定 [基准 尺 寸 2] 。
基准 位 置
设 定 了 基准 位 置 时 以 绿色 显示 [ 设 定 完了 ] , 尚 未 设 定时 则 以 红色 显示 [未 设 定 ] 。
基准 位 置 X, Y, Z, W, P, R
已 被 设 定 的 基准 位 置 的 坐标 值 。
量 确认
肯定 用 来 确认 计算 出 的 补正 量
有 关 补 正 量 确认 的 条 件 , 请
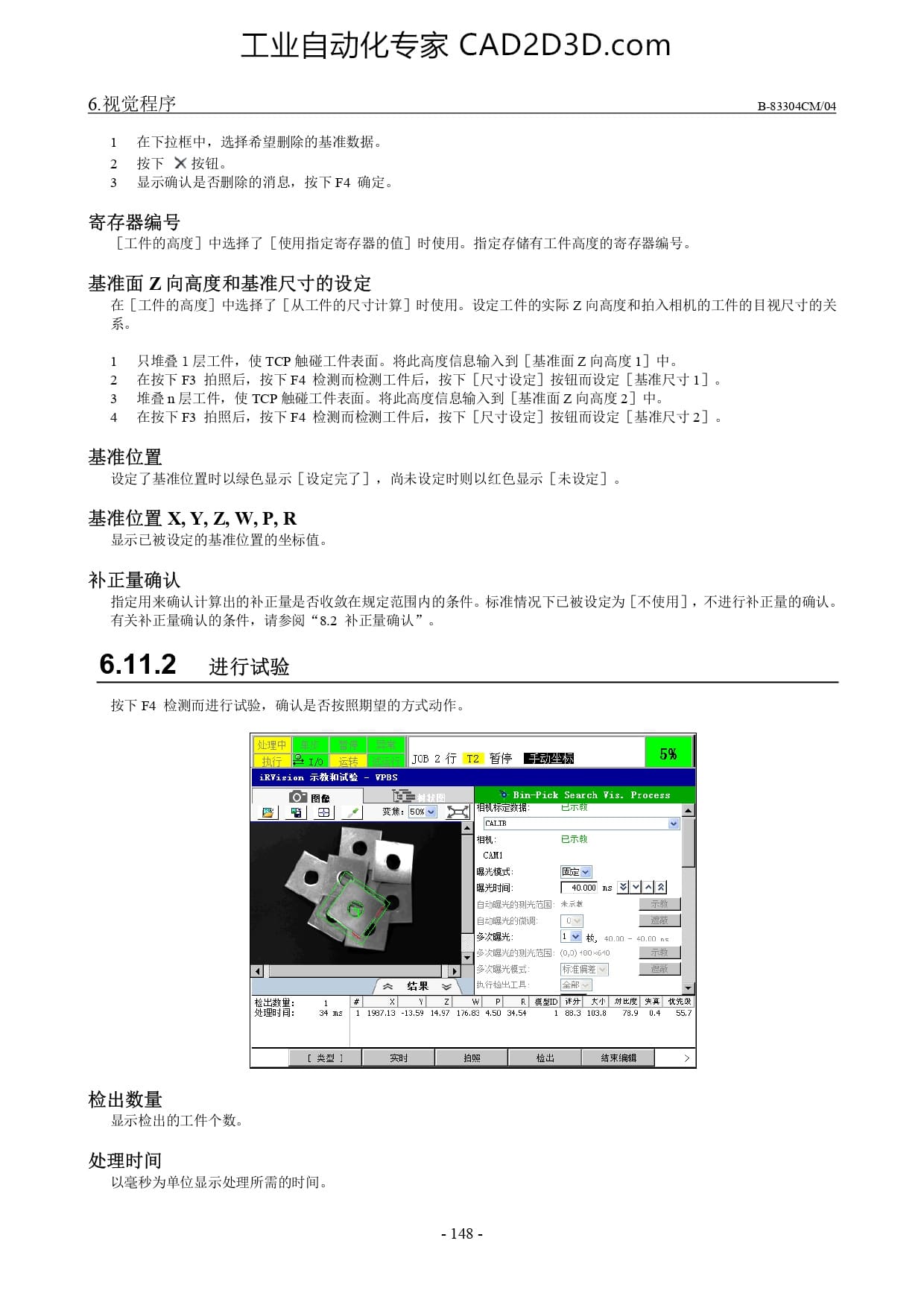
6.11.2 。” 进行 试验
按 下 F4 检测 而 进行
是 否 收敛 在 规定 范围 内 的 条 件 。 标准 情况 下 已 被 设 定 为 [不 使 用 ] ,
阅 “8.2 补正 量 确认 ”。
评 他 | 大 中 | 对 此 订 | 突 真 | 怖 先 阴
1 .66510668 78 04 557
检 出 数量 : 1 #
处 理 时 间 : same | 1 193713 135 1487 17660 450 35
检 出 数量
显示 检 出 的 工件 个 数 。
处 理 时 间
毫秒 为 单位 显示 处 理 所 需 的 时 间 。
-148 -
按 下 [尺寸 设 定 ] 按钮 而 设 定 【 基 准 尺寸 1] 。
B-83304CMI04
KZ 向 高 度 和 拍 入 相机 的 工件 的 目 视 尺寸 的 关
不 进行 补正 量 的 确认 。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)