3 维广域传感器、投影机单元的照射范围和基准距
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 6. 视 觉 程 序
6.15 3 维 广 域 传感器
这 是 使 用 3 维 广 域 传感器 而 取得 3 维 分 布 图 的 视觉 程序 。 为 了 加 以 区 分 , 后 续 内 容 中 将 此 视觉 程序 如 “3 维 广 域 传感器 ”
(3D Area Sensor) 那样 附加 上 引号 予以 表述 。
人 小 注意
此 视觉 程序 只 进行 3 维 分 布 图 的 取得 。 要 检测 工件 , 除 了 “3 维 广 域 传感器 ”外 , 还 需要 创建 并 示 教 “3 维 广
域 传 感 器 3 维 补正 ” (3D Area Sensor Vision Process) 的 视觉 程序 。
6.15.1 ”投影 机 单元 的 照射 范围 和 基准 距
#。 从 投影 机 单元 投射 多 个 条 纹 图 形 , 用 2 台 相
可 以 从 视野 内 的 区 域 取得 格子 状 的 多 个 点 的 3 维 位
构成 3 维 广 域 传感器 的 相机 单元 和 投影 机 单元 被 固定 在 架 座 上 。 为 了 充分 发 挥 3 维 广 域 传感器 的 性 能 , 需 要 针对 收纳 有
作为 测量 对 象 的 工件 的 工件 箱 , 将 相机 单元 和 投影 机 单元 设置 在 适当 的 位 置 。
企 注意
无 法 将 3 维 广 域 传感器 安装 在 机 器 人 的 机 械 手 上 进行 使 用 。
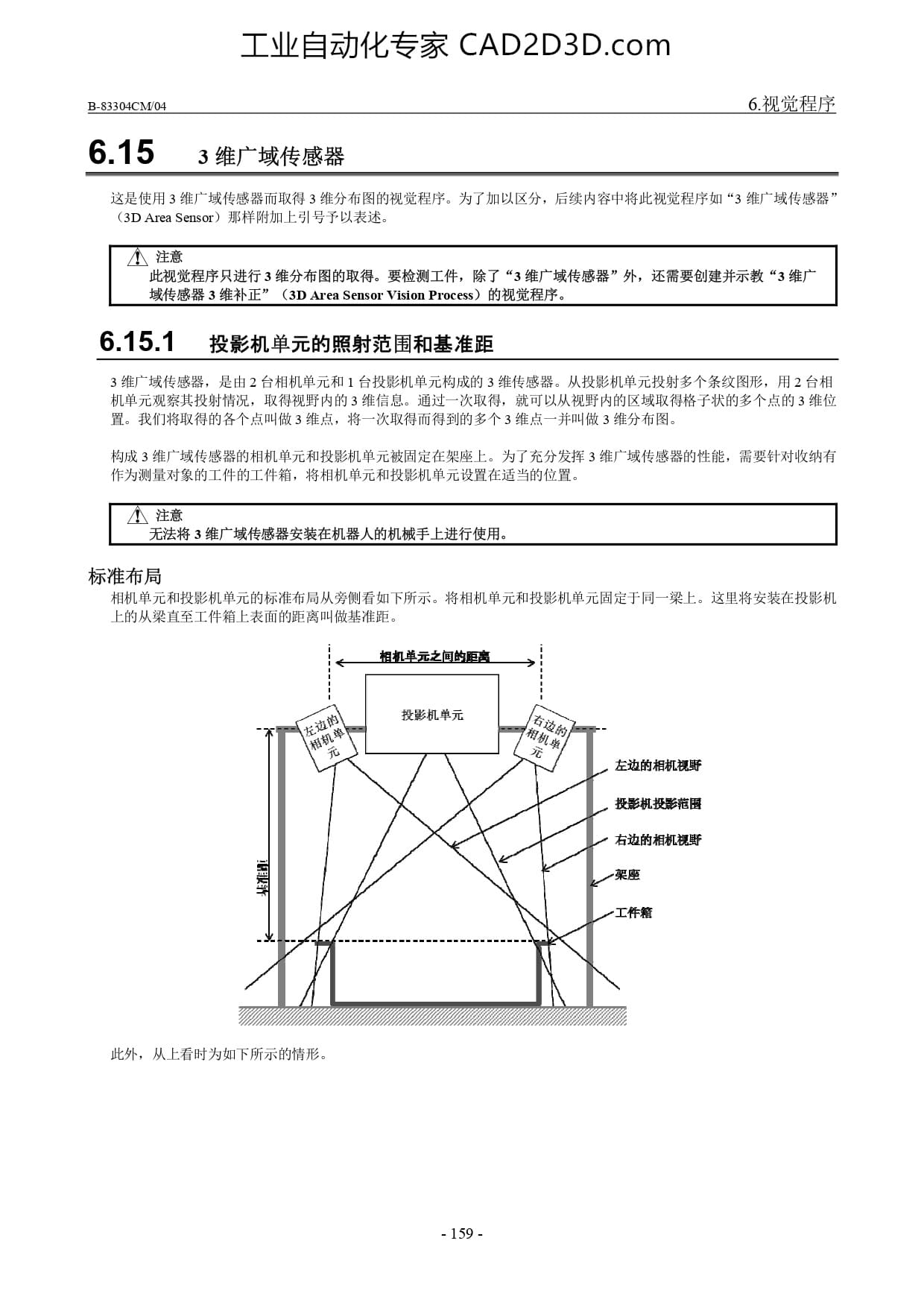
标准 布局
相机 单元 和 投影 机 单元 的 标准 布局 从 旁 侧 看 如 下 所 示 。 将 相机 单元 和 投影 机 单元 固定 于 同一 梁 上 。 这 里 将 安装 在 投影 机
上 的 从 梁 直 至 工件 箱 上 表面 的 距离 叫做 基准 距 。
左边 的 相机 视野
投影 机 投影 范 国
右边 的 相机 视野
此 外 , 从 上 看 时 为 如 下 所 示 的 情形 。
-159 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)