相机视图的示教
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 6. 视 觉 程 序
6.15.3 ”相机 视图 的 示 教
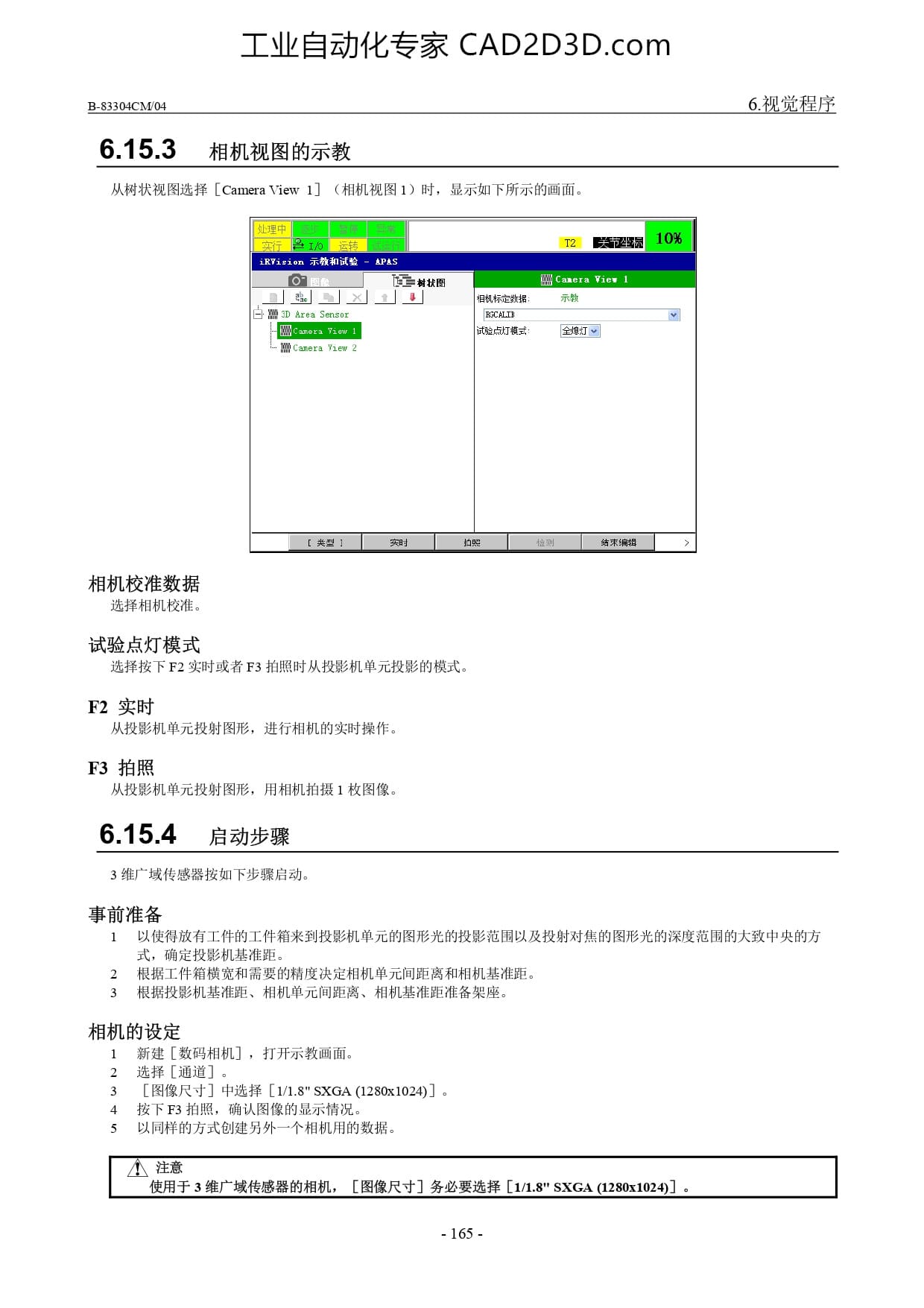
从 树 状 视图 选择 [Camera View 1] 〈 相 机 视图 1) 时 , 显 示 如 下 所 示 的 画面 。
IR E
BT 据 示
FE
T
W Canera vaew 2
fam)
相机 校准 数据
选择 相机 校准 。
试验 点 灯 模式
选择 按 下 F2 实
F2 实时
从 投影 机 单元 投射 图 形 , 进 行 相 机 的 实时 操作 。
F3 拍照
从 投影 机 单元 投射 图 形 , 用 相机 拍摄 1 枚 图 像 。
6.15.4 ”启动 步 又
3 维 广 域 传感器 按 如 下 步骤 启动 。
或 者 F3 拍照 时 从 投影 机 单元 投影 的 模式 。
得 放 有 工件 的 工件 箱 来 到 投影 机 单元 的 图 形 光 的 投影 范围 以 及 投射 对 焦 的 图 形 光 的 ;
式 , 确 定投 影 机 :
2 根据 工件 箱 横 宽 和 需要 的 精度 决定 相机 单元 间距 离 和 相机 基准 距 。
3 ”根据 投影 机 基准 距 、 相 机 单元 间距 离 、 相 机 基准 距 准 备 架 座 。
相机 的 设 定
1 , 新建 [数码 相机 ] , 打 开 示 教 画面 。
2 选择 [通道 ] 。
3 [图像 尺 寸 ] 中 选择 [1/1.8" SXGA (1280x1024)] 。
4 按 下 F3 拍 确认 图 像 的 显示 情况 。
5 以 同样 的 方式 创建 另外 一 个 相机 用 的 数据 。
筷 围 的 大 致 中 央 的 方
企 注意
使 用 于 3 维 广 域 传感器 的 相机 ,【[ 图 像 尺寸 ] 务必 要 选择 [1/1.8" SXGA (1280x1024)] .
-165 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)