GETCROSS
工业 自动 化 专家 CAD2D3D.com
B-§3304CM04 12. 其 他 选项 功能
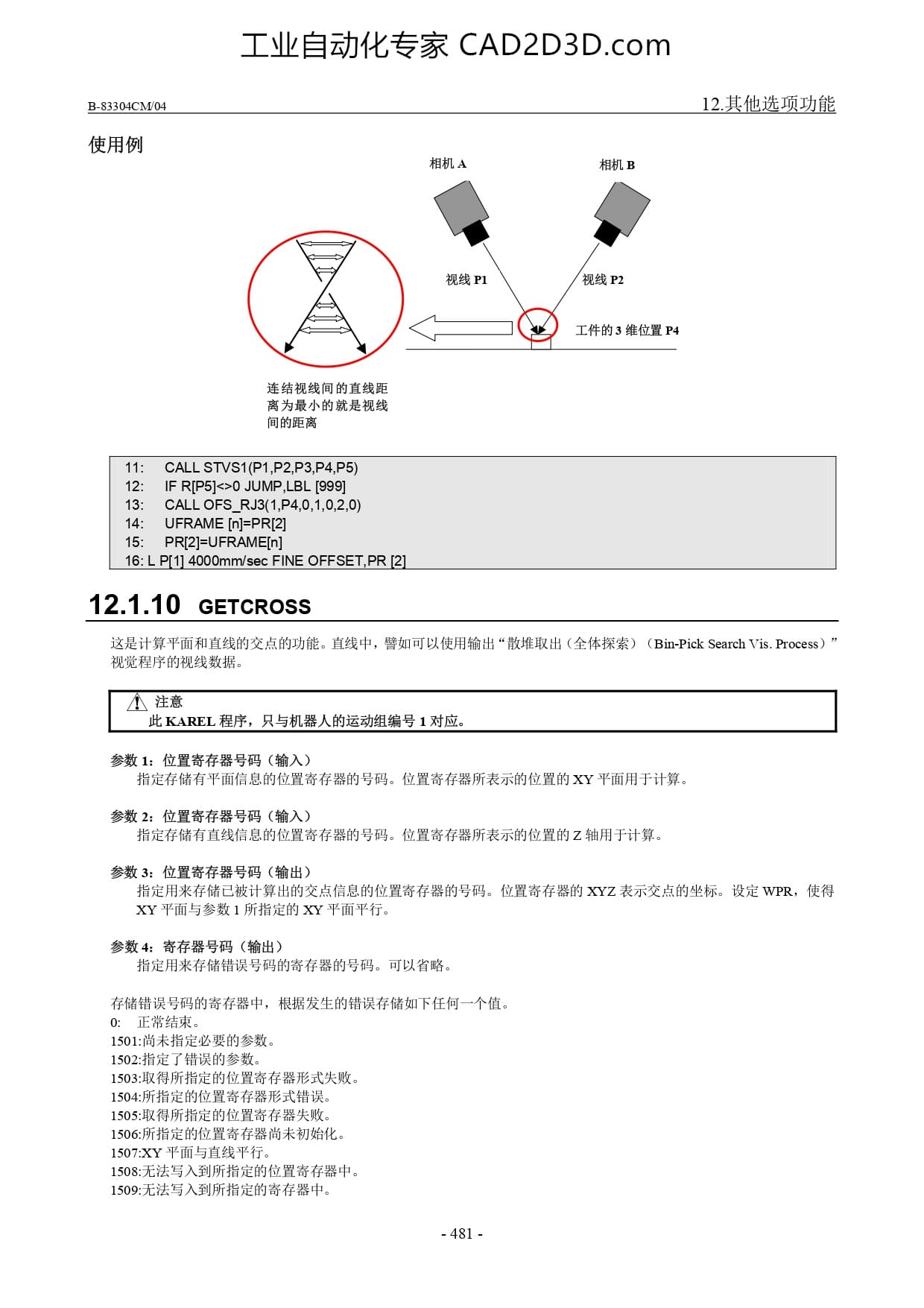
使 用 例
工件 的 3 维 位 置 P4
连结 视线 间 的 直线 下
离 为 最 小 的 就 是 视线
间 的 距离
11: CALL STVS1(P1,P2,P3,P4,P5)
12: IF R[P5]<>0 JUMP LBL [999]
13: CALL OFS_RJ3(1,P4,0,1,02,0)
14: UFRAME [n]=PR[2]
15: PR[2]=UFRAME[n]
16: L P[1] 4000mmsec FINE OFFSET,PR [2]
12.1.10 GETCROSS
这 是 计算 平面 和 直线 的 交点 的 功能 。 直线 中 , 艾 如 可 以 使 用 输出 “ 散 堆 取出 (全体 探索 ) (Bin-Pick Search Vis. Process) ”
视觉 程序 的 视线 数据 。
参数 1: 位 置 寄 存 器 号 码 〈 输 入 )
指定 存储 有 平面 信息 的 位 置 寄 存 器 的 号 码 。 位 置 寄 存 器 所 表示 的 位 置 的 XY 平面 用 于 计算 。
参数 2; 位 置 寄 存 器 号 码 〈 输 入 )
指定 存储 有 直线 信息 的 位 置 寄存 器 的 号 码 。 位 置 寄存 器 所 表示 的 位 置 的 Z 轴 用 于 计算 。
参数 3: 位 置 寄 存 器 号 码 〈 输 出
指定 用 来 存储 已 被 计算 出 的 交 。
XY 平面 与 参数 1 所 指定 的 XY
的 位 置 寄存 器 的 号 码 。 位 置 寄存 器 的 XYZ 表示
面 平行 。
坐标 。 设 定 WPR, 使 得
参数 4:, 寄存 器 号 码 〈 输 出 )
指定 用 来 存储 错误 号 码 的 寄存 器 的 号 码 。 可 以 省 略 。
存 器 中 , 根 据 发 生 的 错误 存储 如 下 任何 一 个 值 。
-481-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)