特征点列输出
工业 自动 化 专家 CAD2D3D.com
和 视觉 程序
B-83304CMI04
6.14 特征 点 列 输出
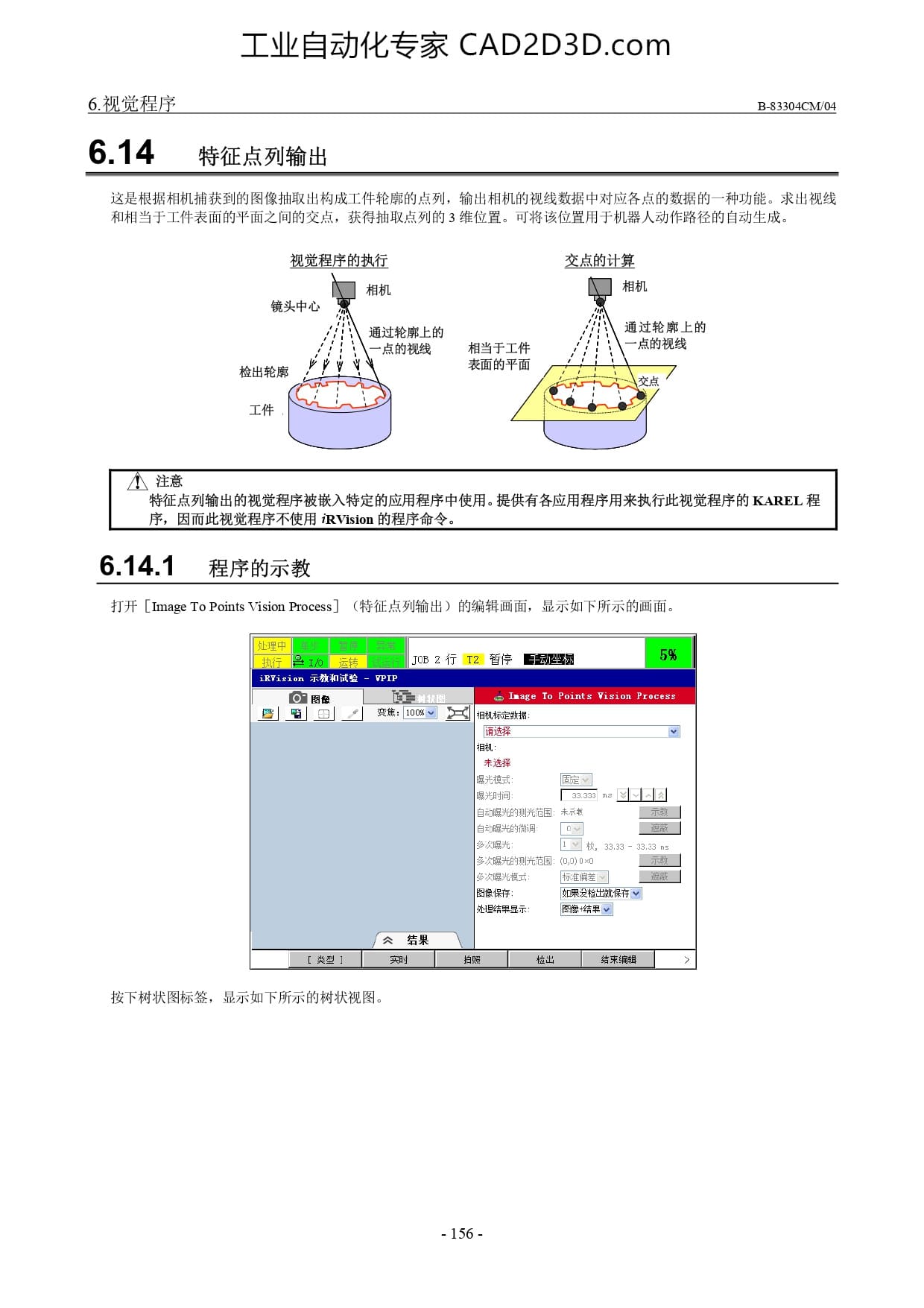
这 是 根据 相机 捕获 到 的 图 像 抽 取出
和 相当 于 工件 表面 的 平面 之 间 欠
光 成 工件 轮廓 的 点 列 , 输 出 相机 的 视线 数据 中 对 应 各 点 的 数据 的 一 种 功能 。 求 出 视线
获得 抽取 点 列 的 3 维 位 置 。 可 将 该 位 置 用 于 机 器 人 动作 路 径 的 自动 生成 。
视觉 程序 的 执行 交点 的 计算
通过 轮廓 上 的
一 点 的 视线
特征 点 列 输出 的 视觉 程序 被 嵌入 特定 的 应 用 程序 中 使 用 。 提供 有 各 应 用 程序 用 来 执行 此 视觉 程序 的 KAREL 程
序 , 此 视觉 程序 不 使 用 认 Vision 的 程序 命令 。
6.14.1 ”程序 的 示 教
打开 [Image To Points Vision Process] 〈 特 征 点 列 输出 ) 的 编辑 画面 , 显 示 如 下 所 示 的 画面 。
SRR+ Ty
B[] S
E 国 委 as- aaa
次 曝光 的 出 光 范 国 : (opj0x0
5 R
图 要 保存
nEseaT
—
[~ &8\
[类 型 1 =0 A [ L >
按 下 树 状 图 标签 , 显 示 如 下 所 示 的 树 状 视图 。
-156 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)