校准点的确认、校准面、Vt、Hz、X/Y/Z、误差、删除校准点
工业 自动 化 专家 CAD2D3D.com
B-§3304CM/04 5. 相 机 校准
5.1.2 ”校准 点 的 确认
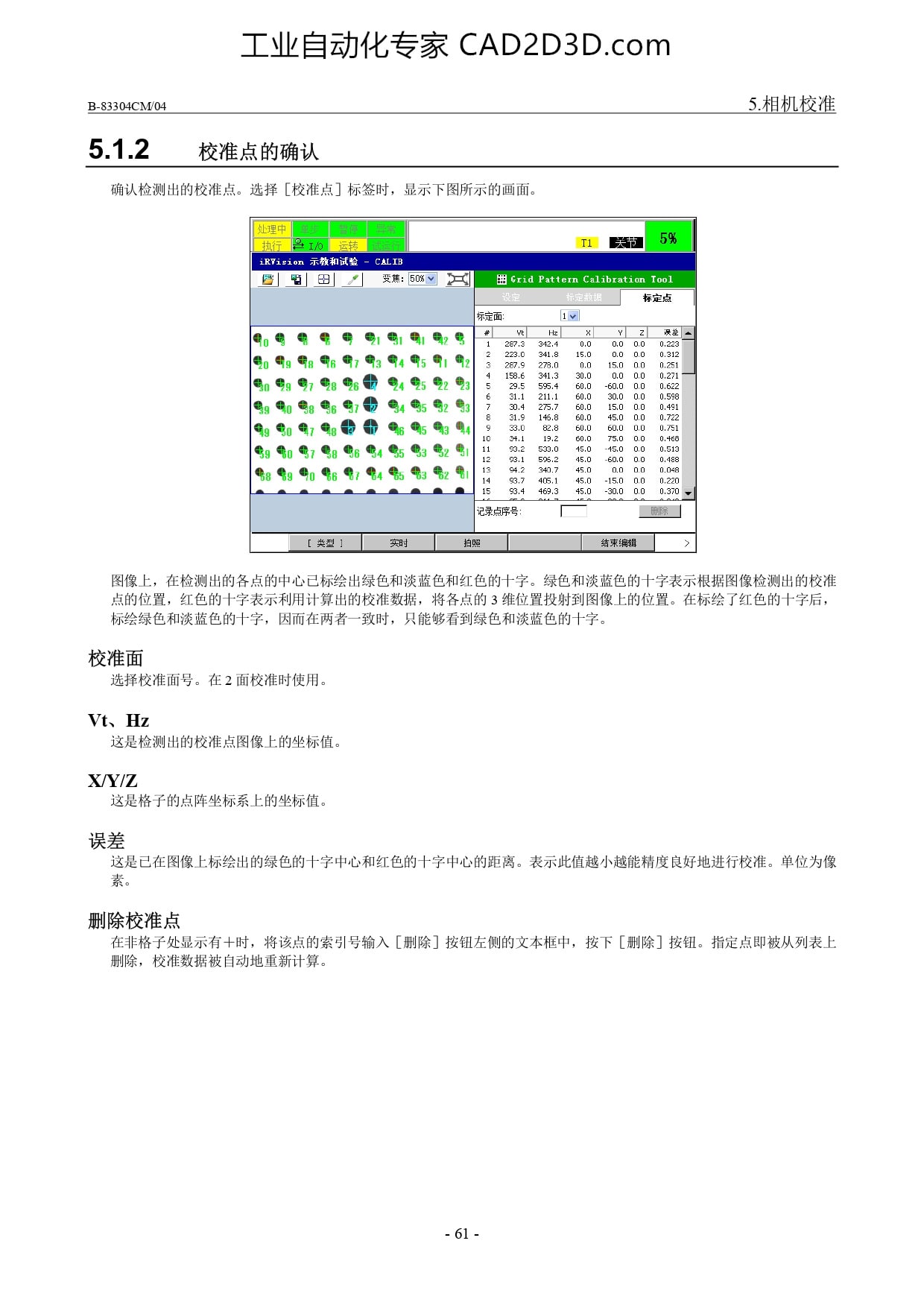
确认 检测 出 的 校准 点 。 选 择 [校准 点 ] 标签 时 , 显 示 下 图 所 示 的 画面 。
B e
] W] 田 | ~] =FEy
标定 点
证 画 [
7 T T ] B Y YP
@@ @ QG DR B/S 4 0 w0 00 0229
2 amo wie 10 oo 00 0312
Q) @y B X B B R A5 B K| 5 o5 omo 0o 150 00 0251
4 imé o w0 00 00 oz
9,9, 9,99, ¢, 999 35 564 w0 -600 00 0622
3 241 60.0 300 00 0598
¢
RO uWQ UKNY | ooy
90 @ @@ @ @ R % 9| S0 w0 wo om0 s um
1 w1 B2z @0 750 00 04
©;9,@,0,@;@, @@, 8, 8| oz spo 40 -60 00 0519
Qo Qo @ B B QW ®WH N T ST DT N0 S0 o
i 35 i3 %o 0 o0 13 o
记录 点 序号 |
[ 类 型 ] 58 拍照 SR >
图 像 上 , 在 检测 出 的 各 点 的 中 心 已 标 绘 出 绿色 和 淡 蓝 色 和 红色 的 十 字 。 绿 色 和 淡 蓝 色 的 十 字 表示 根据 图 像 检 测 出 的 校准
的 位 置 , 红 色 的 十 : 利用 计算 出 的 校准 数据 , 将 各 点 的 3 维 位 置 投 和 像 上 的 位 置 。 在 标 绘 了 红色 的 十 字 后 ,
慰 绘 绿色 和 淡 蓝 色 的 十 字 , 因 而 在 两 者 一 致 时 , 只 能 够 看 到 绿色 和 淡 蓝 色 的 十 字 。
校准 面
选择 校准 面 号 。 在 2 面 校准 时 使 用 。
Vt、Hz
这 是 检测 出 的 校准 点 图 像 上 的 坐标 值 。
XI/Y/Z
这 是 格子 的 点 阵 坐 标 系 上 的 坐标 值 。
误差
这 是 已 在 图 像 上 标 绘 出 的 绿色 的 十 字 中 心 和 红色 的 十 字 中 心 的 距离 。 表 示 此 值 越 小 越 能 精度 良好 地 进行 校准 。 单 位 为 像
删除 校准 点
在 非 格子 处 显示 有 十 时 , 将 该 点 的 索引 号 输入 [删除 ] 按钮 左 侧 的 文本 框 中 , 按 下 【删除 ] 按钮 。 指 定点 即 被 从 列表 上
删除 , 校 准 数据 被 自动 地 重新 计算 。
-61-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)