散堆取出(全体探索)
工业 自动 化 专家 CAD2D3D.com
6. 视 觉 程序
它 除 了 通常 的 2 维 补正 外 , 还 根据 拍 入 相
进行 补正 。 通 过 与 磁力 机 械 手 等 进行 组
散 堆 取出 〈 全 体 探索 )
(Bin-Pick Search Vis. Process) 是 这 样 一 种 视觉 程序
)
机 的 工件 的 目 视 大 小 对 工件 高 度 方向 进行 补正 , 根 据 从 相机 到 工件 的 视 纪
目 相机
散 堆 取出 《全体 探
合 , 可 轻易 构筑 起 散 堆 取出 系统 。
磁力 机 械 手
6.11.1 ”程序 的 示 教
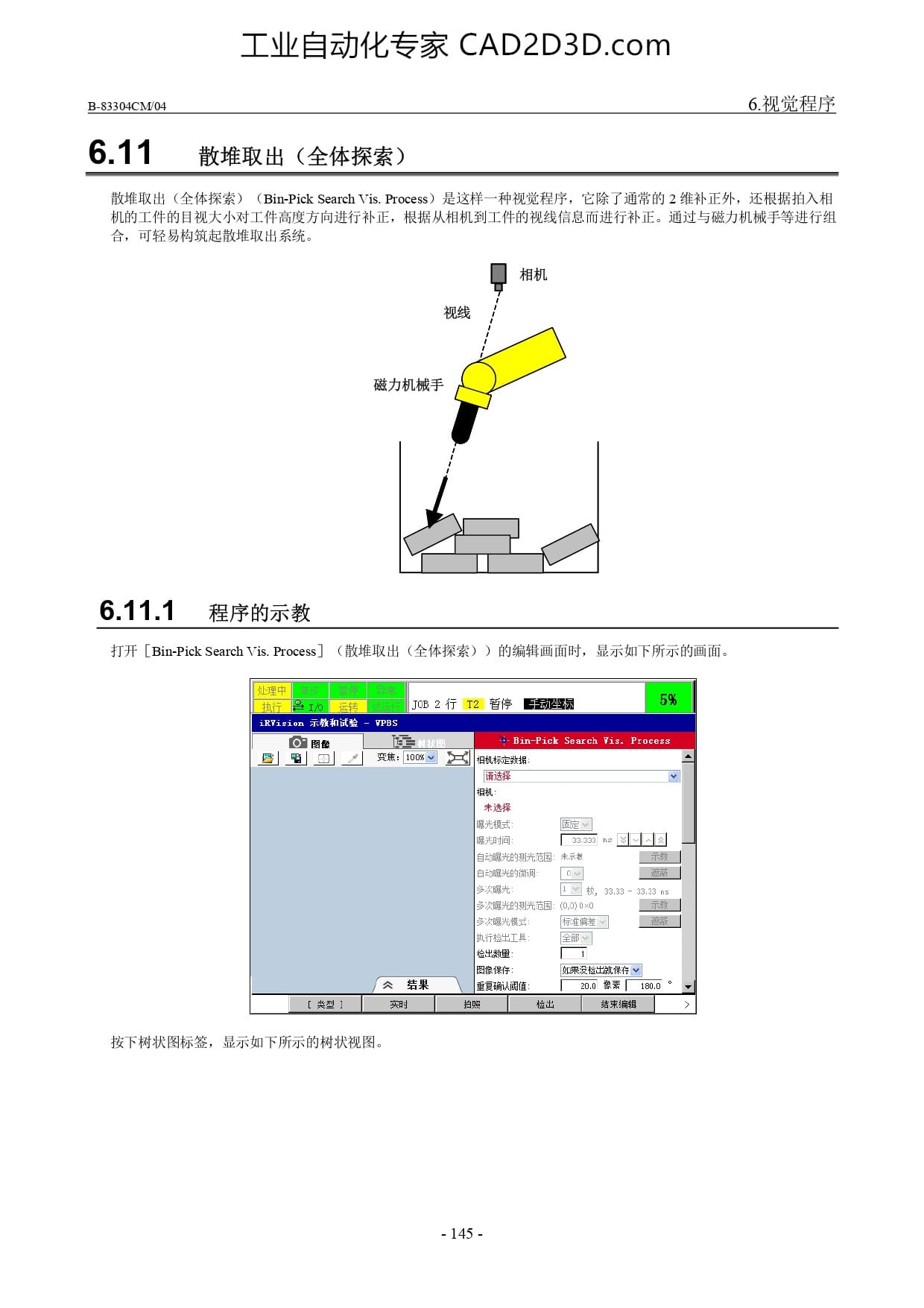
打开 [Bin-Pick Search Vis. Process] 《〈 散 堆 取 出 〈 全 体 探索 ) ) 的 编辑 画面 时 , 显 示 如 下 所 示 的 画面 。
Ja 2 47 12 HiF EEEER
Bin-Pick Search Vis. Process
204
&
按 下 树 状 图 标签 , 显 示 如 下 所 示 的 树 状 视图 。
-145-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)