机器人生成点阵校准、相机的校准
工业 自动 化 专家 CAD2D3D.com
5. 相 机 校准 B.83304CMI04
5.2 机 器 人 生成 点 阵 校准
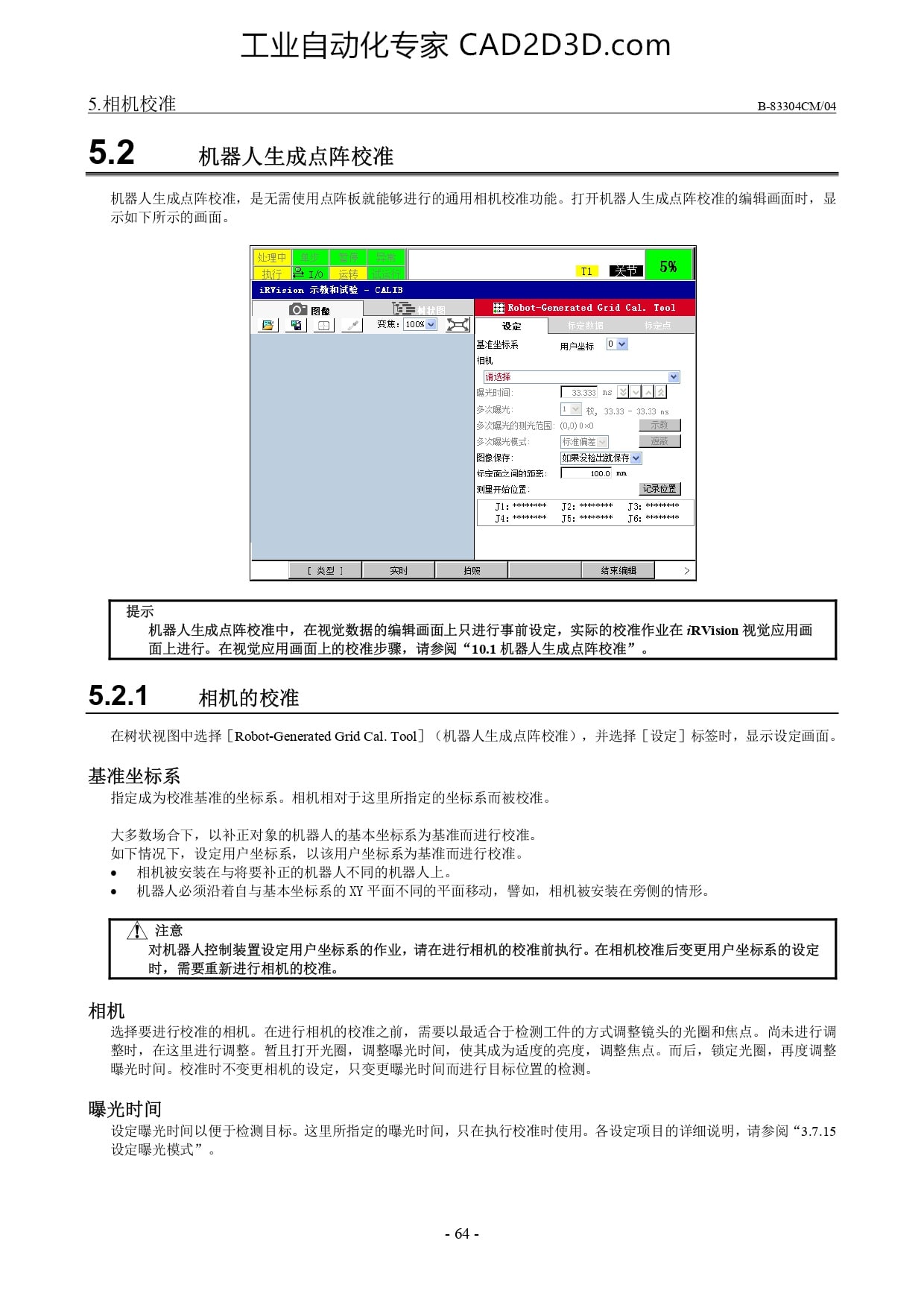
机 器 人 生成 点
示 如 下 所 示 的 画面 。
, 是 无 需 使 用 点 阵 板 就 能 够 进行 的 通用 相机 校准 功能 。 打 开机 器 人 生成 点 阵 校准 的 编辑 画面 时 , 显
&) ] o) | oo 2w
LELTR mruE 0¥
.
项
[ET 本
[国术 3333 - 223 os
图 称 保 存
e AR oo
B 当时 |
Jo weveen T3, e T3 weees
DT wevees Tg, ekt Tg, ks
[ 类 型 ] 535 拍照 结束 编辑 >
提示
机 器 人 生成 点 阵 校准 中 , 在 视觉 数据 的 编辑 画面 上 只 进行 事前 设 定 , 实 际 的 校准 作业 在 认 Vision 视觉 应 用 画
视觉 应 用 画面 上 的 校准 步骤, 请 参阅 “10.1 机 器 人 生成 点 阵 校准 ”。
5.2.1 相机 的 校准
在 树 状 视 图 中 选择 [Robot-Generated Grid Cal. Tool] 〈 机 器 人 生成 点 阵 校准 ) , 并 选择 [ 设 定 ] 标签 时 , 显 示 设 定 画面 。
指定 成 为 校准 基准 的 坐标 系 。 相 机 相对 于 这 里 所 指定 的 坐标 系 而 被 校准
大 多 数 场合 下 , 以 补正 对 象 的 机 器 人 的 基本 坐标
如 下 情况 下 , 设 定 用 户 坐 标 系 , 以 该 用 户 坐标 系 为 基准 而 进行 校准 。
。 ”相机 被 安装 在 与 将 要 补正 的 机 器 人 不 同 的 机 器 人 上 。
。 ”机 器 人 必须 沿 着 自 与 基本 坐标 系 的 并 平面 不 同 的 平面 移动 , 璧 如, 相机 被 安装 在 劳 侧 的 情形 。
系 为 基准 而 进行 校准 。
_ 尚 未 进行 调
整 时 , 在 这 里 和 调整 。 暂 且 打 开光 圈 , 调 整 光 果 间 , 使 其 成 适度 ,
曝光 时 间 。 校 准时 不 变更 相机 的 设 定 , 只 变更 曝光 时 间 而 进行 目标 位 置 的 检
曝光 时 间
i 光 时 间 以 便于 检测 目标 。 这 里 所 指定 的 曝光 时 间 , 只 在 执行 校准 时 使 用 。 各 设 定 项 目的 详细 说 明 , 请 参阅 “3.7.15
光 模 式 ”-。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)