3 维广域传感器箱子检出工具
工业 自动 化 专家 CAD2D3D.com
7. 命 令 行 工 具 B-83304CM/04
7.42.1 ”参数 的 设 定
输入 图 像
选择 用 于 模型 的 示 教 和 检 出 的 图 像 。 视 觉 程 序 中 有 图 像 过 滤器 工具 或 者 图 像 运算 工具 时 , 可 以 选择 “原始 图 像 ”以 外 的
图 像 。 在 不 是 对 相机 拍摄 的 未 经 处 理 的 图 像 , 而 是 希望 对 经 过 过 滤 处 理 的 图 像 执行 3 维 广 域 传感器 箱子 检 出 工具 时 使 用 。
有 关 详 情 , 请 参阅 “7.26 图 像 预 处 理工 具 ”、“7.27 图 像 过 滤器 工具 ”、“7.45 图 像 运算 工具 ”、“7.46 阴影 去 除 工
A
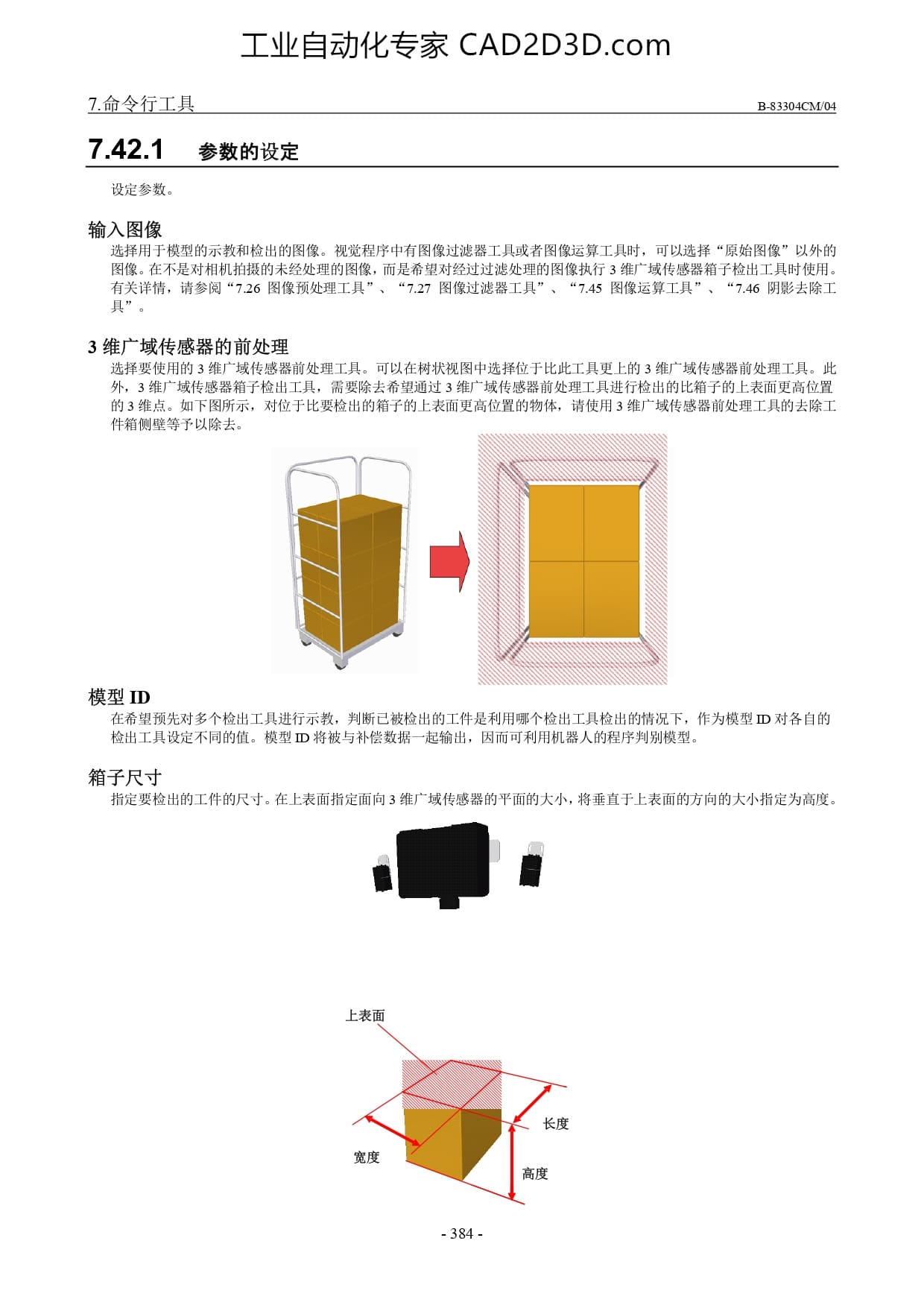
3 维 广 域 传 感 器 的 前 处 理
选择 要 使 用 的 3 维 广 域 传感器 前 处 理工 具 。 可 以 在 树 状 视图 中 选择 位 于 比 此 工具 更 上 的 3 维 广 域 传感器 前 处 理工 具 。 此
外 ,3 维 广 域 传感器 箱子 检 出 工具 , 需 要 除去 希望 通过 3 维 广 域 传 感 器 前 处 理工 具 进行 检 出 的 比 箱子 的 上 表面 更 高 位 置
的 3 维 点 。 如 下 图 所 示 , 对 位 于 比 要 检 出 的 箱子 的 上 表面 更 高 位 置 的 物体 , 请 使 用 3 维 广 域 传感器 前 处 理工 具 的 去 除 工
件 箱 侧 辟 等 予以 除去 。
模型 ID
在 希望 预先 对 多 个 检 出 工具 进行 示 教 , 判 断 己 被 检 出 的 工件 是 利用 哪个 检 出 工具 检 出 的 情况 下 , 作 为 模型 ID 对 各 自 的
检 出 工具 设 定 不 同 的 值 。 模 型 ID 将 被 与 补偿 数据 一 起 输出 , 因 而 可 利用 机 器 人 的 程序 判别 模型
箱子 尺寸
指定 要 检 出 的 工件 的 尺寸 。 在 上 表面 指定 面向 3 维 广 域 传感器 的 平面 的 大 小 , 将 垂直 于 上 表面 的 方向 的 大 小 指定 为 高 度 。
上 表面
-384-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)