校准点的确认
工业 自动 化 专家 CAD2D3D.com
B-§3304CM/04 5. 相 机 校准
图 像 保存
指定 在 执行
被 保存 起 来 。
校准 面 之 间 的 距离
指定 校准 面 1 和 校准 面 2 人 则 归
之 间 的 距离 较 小 时
相 比 校准 面 1 会 更 靠近 相机 , 因而 在 作 时 干涉 外 | 图 设备 的 危险 时
定 负 值 , 校 准 面 2 相 比 校准 面 1 会 更 靠近 相机 。
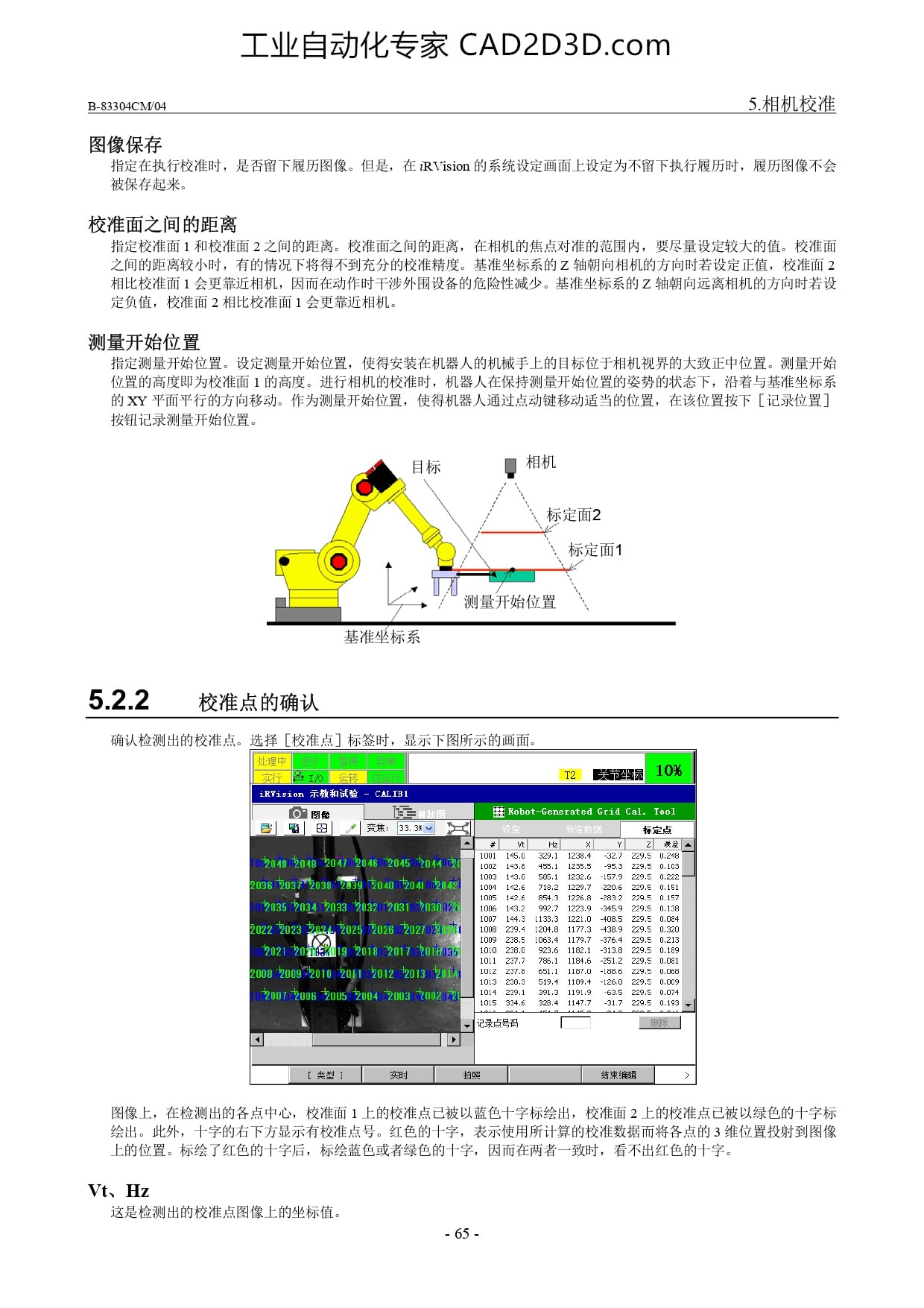
测量 开始 位 置
指定 测量 开始 位 置 。 设 定 测量 开始 位 置 , 使 得 安装 在 机 器 人 的 机 械 手 上 的 目标 位 于 相机 视界 的 大 致 正中 位 置 。 2
位 置 的 高 度 即 为 校准 面 1 的 高 度 。 进 行 相机 的 校准 时 , 机 器 人 在 保持 测量 开始 位 置 的 姿势 的 ; ¥
的 XY 平面 平行 的 方向 移动 。 作 为 测量 开始 位 置 , 使 得 机 器 人 通过 点 动 键 移动 适当 的 位 置 , 在 该
按钮 记录 测量 开始 位 置 。
准时 , 是 否 留 下 履历 图 像 。 但 是 , 在 逮 Vision 的 系统 设 定 画面 上 设 定 为 不 留 下 执行 履历 时 , 履 历 图 像 不 会
寺 准 的 范围 内 , 要 尽量 设 定 较 大 的 值 。 校 准 面
的 工 轴 朝 向 相机 的 方向 时 若 设 定 正 值 , 校 准
少 。 基准 坐标 系 的 Z 轴 朝 向 远离 相机 的 方向 时 若 设
位 置 按 下 [记录 位 置 ]
基准 坐标 系
5.2.2 校准 点 的 确认
确认 检测 出 的 校准 点 。 选
标定 点
W e 7 %2
W 1m0 Gma 1ZEA G2 295 126
02 1 40 1235.5 953 295 0403
1003 149.0 565.1 126 1579 295 022
1004 1@ 7132 1229.7 -2206 229.5 LIS
1005 1e26 B3 12268 282 295 0157
1006 12 927 12233 -3459 295 0.138
107 143 1133.3 122L.0 -4085 229.5 0.084
1008 294 1204.8 1177.3 -4389 229.5 0.320
1009 2 1063.4 1179.7 -3764 229.5 0.213
100 2580 923.6 11821 -3138 229.5 0.189
100 277 755.1 1184.6 -2512 229.5 0.081
10tz 2378 65L.1 ar0 -Il556 zz29.5 0.065
1013 230.3 519.4 1A 1260 295 0.009
00 239.4 391.3 119L9 -635 295 0.074
os 3246 394 497 w7 mes o of
图 像 上 , 在 检测 出 的
绘 出 。 此 外 , 十 字 的 表示 使 用 所 计算 的 校准 数据 再 将 各 点 的
上 的 位 置 。 标 绘 了 红色 的 十 未 绿色 的 十 字 , 因 而 在 两 者 一 致 时 , 看 不 出 红色 的
Vt、Hz
这 是 检测 出 的 校准 点 图 像 上 的 坐标 值 。
-65 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)