校准数据的确认
工业 自动 化 专家 CAD2D3D.com
和. 相机 校准 B-83304CM/04
X/Y/Z
这 是 在 进行 格子 补正 的 用 户 坐 标 系 上 的 坐标 值 。
误差
这 是 已 在 图 像 上 标 绘 出 的 绿色 或 者 蓝 色 的 十 字 中 心 和 红色 的 十 字 中 心 之 间 的 距离 。 它 表示 此 值 越 小 越 能 够 精度 良好 地 进
行 校准 。 单 位 为 像素 。
删除 校准 点
按钮 。 指
5.2.3 ”校准 数据 的 确认
有 十 时 , 在 列表 上 选择 该 者 将 该 点 的 索引 号 输入 到 【删除 ] 按钮 左 侧 的 文本 框 中 , 按 下 [删除 ]
被 从 列表 上 删除 , 校 准 数据 被 自动 地 重新 计算 。
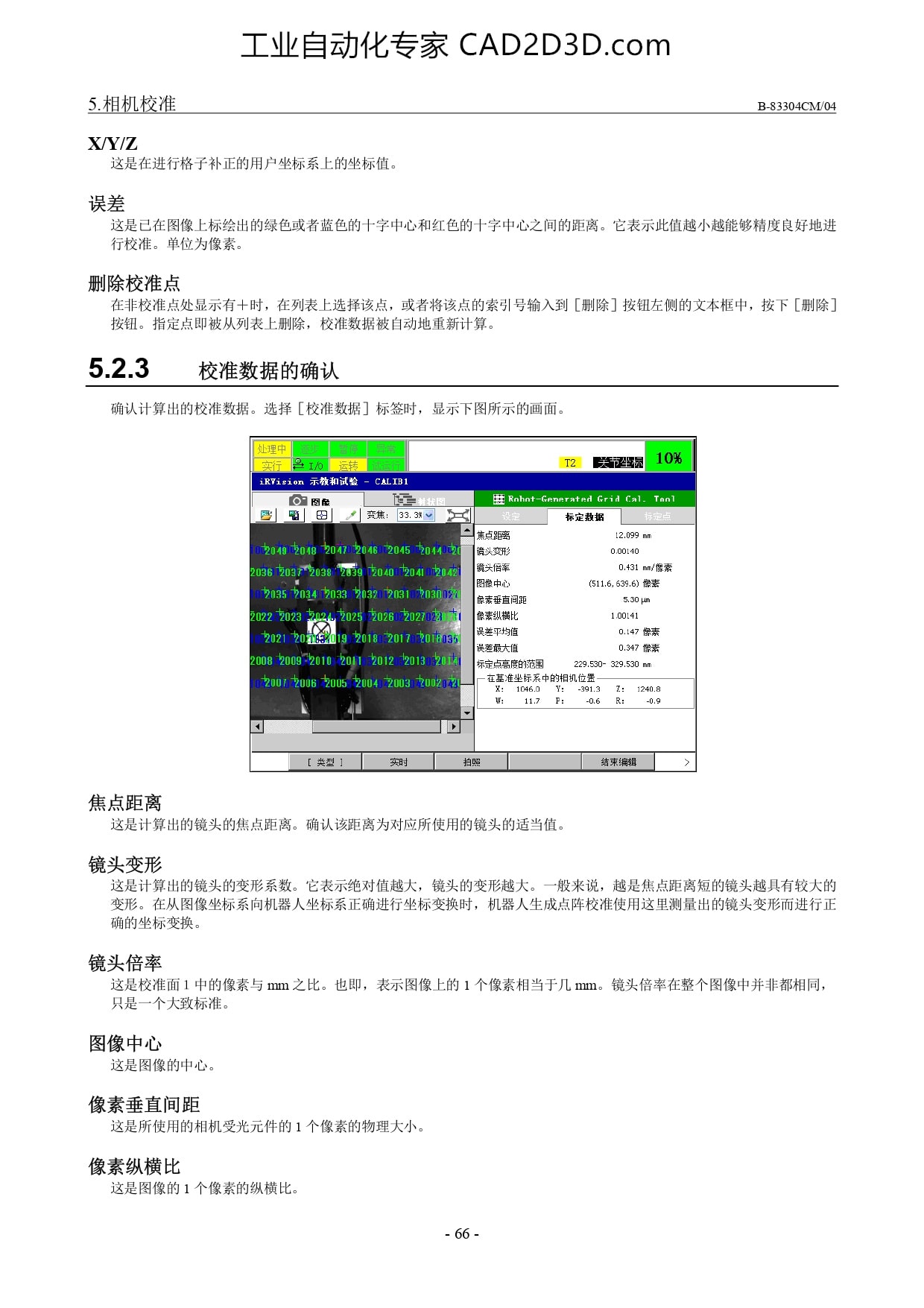
确认 计算 出 的 校准 数据 。 选 择 [校准 数 据 ] 标签 时 , 显 示 下 图 所 示 的 画面 。
12099 mm
o000
0.431 mm 入 素
(5116,530.6) BF
sa0pm
100t41
0,47 B3
0.347 像素
229.530- 329.530 mm
[ 类 型 ] 实时 拍照 SR >
焦点 距离
这 是 计算 出 的 镜头 的 焦点 距离 。 确 认 该 距离 为 对 应 所 使 用 的 镜头 的 适当 值 。
这 是 计算 出 的 镜头 的 变形 系数 。 它 表示 绝对 值 越 大 , 镜 头 的 变形 越 大 。 一 般 来 说 , 越 是
变形 。 在 从 图 像 坐 标 系 向 机 器 人 坐标 系 正确 进行 坐标 变换 时 , 机 器 人 生成 点 阵 校准 使 用 这
确 的 坐标 变换 。
镜头 倍率
这 是 校准 面 1 中 的 像素 与 mm 之 比 。 也 即 , 表 示 图 像 上 的 1 个 像素 相当 于 几 mm。 镜 头 倍率 在 整个 图 像 中 并 非 都 相同 ,
只 是 一 个 大 致 标准 。
图 像 中 心
这 是 图 像 的 中 心 。
像素 垂直 间距
这 是 所 使 用 的 相机 受 光 元 件 的 1 个 像素 的 物理 大 小 。
像素 纵横 比
这 是 图 像 的 1 个 像素 的 纵横 比 。
点 距离 短 的 镜头 越 具 有 较 大 的
测量 出 的 镜头 变形 而 进行 正
-66 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)