立体传感器校准
工业 自动 化 专家 CAD2D3D.com
B-§3304CM/04 5. 相 机 校准
误差 平均 值 、 最 大 值
这 是 校准 点 标签 表 中 所 显示 的 各 个 校准 点 的 误差 平均 值 和 最 大 值
校准 点 高 度 的 范围
这 是 检测 出 的 校
在 基准 坐标 系 中 的 相机 位 置
显示 从 基准 坐标 系 看 到 的 相机 信
5.2.4 自动 再 校准
系统 运行 开始 后 因为 某 种 理由 而 相机 偏 移 或 者 进行 更 换 时 , 需 要 进行 相机 的 再 校准 。 这 种 情况 下 , 使 用 自动 再 校准 即 可
简单 地 进行 恢复 。 此 外 , 由 于 了 作 即 可 恢复 , 可 以 避免 作业 人 员 的 人 为 失误 。 机 器 人 生成 点 阵 校准 中 , 自 动 生
成 校准 用 程序 , 因 而 通过 此 程序 就 可 以 进行 再 校准 。
的 、 基 准 坐标 系 中 的 民 高 度 的 范围 。
A\ 注意
自动 再 校准 中 不 会 进行 目标 设置 信息 的 再 设 定 。 将 目标 牢 牢固 定 于 最 初 校准 的 位 置 , 请 :
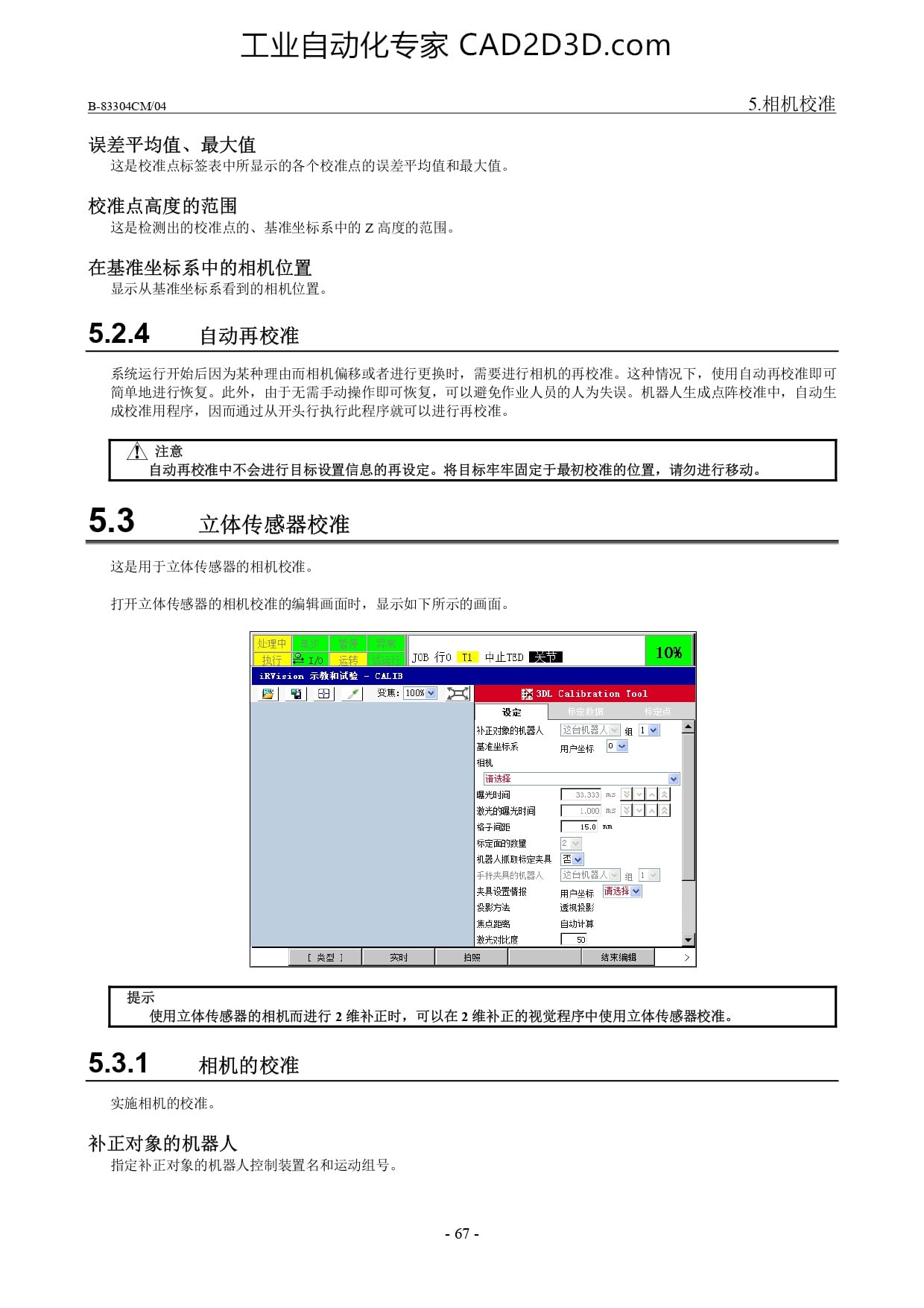
5.3 立体 传感器 校准
这 是 用 于 立体 传感器 的 相机 校准 。
打开 立体 传感器 的 相机 校准 的 编辑 画面 时 , 显 示 如 下 所 示 的 画面 。
I Il JoB 470 “TL ehibTED
] | 田 | ] :Homgg Ze| 详 3DL Calibration Tool
设 定
补正 对 知 的 机 器 人
=
——
[ ne 二 |
et [ oo e [
5 FEIRE 15.0 mm
RIS
N2 A B
| FATREE2E,
LRBEER
REAE
i
skt s
[类 型 ] 实时 拍照 竺 束 编辑
提示
使 用 立体 传感器 的 相机 而 进行 2 维 补正 时 , 可 以 在 2 维 补正 的 视觉 程序 中 使 用 立体 传感器 校准 。
5.3.1 相机 的 校准
实施 相机 的 校准 。
对 象 的 机 器 人
攻 定 补正 对 象 的 机 器 人 控制 装置 名 和 运动 组 号 。
-67-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)