校准点的确认
工业 自动 化 专家 CAD2D3D.com
3. 相机 校准 B-83304CM/04
4 ”确认 几乎 所 有 的 点 都 已 被 检测 , 激 光 投影 线 已 清楚 地 被 检测 。 检 测 成 功 时 ,【 校 准 面 1] 示 教 完成 。
5 在 使 得 校准 板 和 立体 传感器 离开 大 约 450 mm 〈 基 准 距 为 600 mm 的 立体 传感器 时 为 650 mm) 而 正 对 。
6 按 下 [校准 面 2] 的 [拍照 十 检测 ] 按钮 。
7 ”以 使 得 只 有 校准 板 收敛 于 检索 窗口 内 的 方式 , 对 点 阵 板 、 激 光 点 列 的 检索 窗口 进行 示 教 , 按 下 F4 确定 。
8 ”确认 几乎 所 有 的 点 都 已 被 检测 , 激 光 投影 线 已 清楚 地 被 检测 。 检 测 成 功 时 ,【 校 准 面 2] 示 教 完成 。
5.3.2 校准 点 的 确认
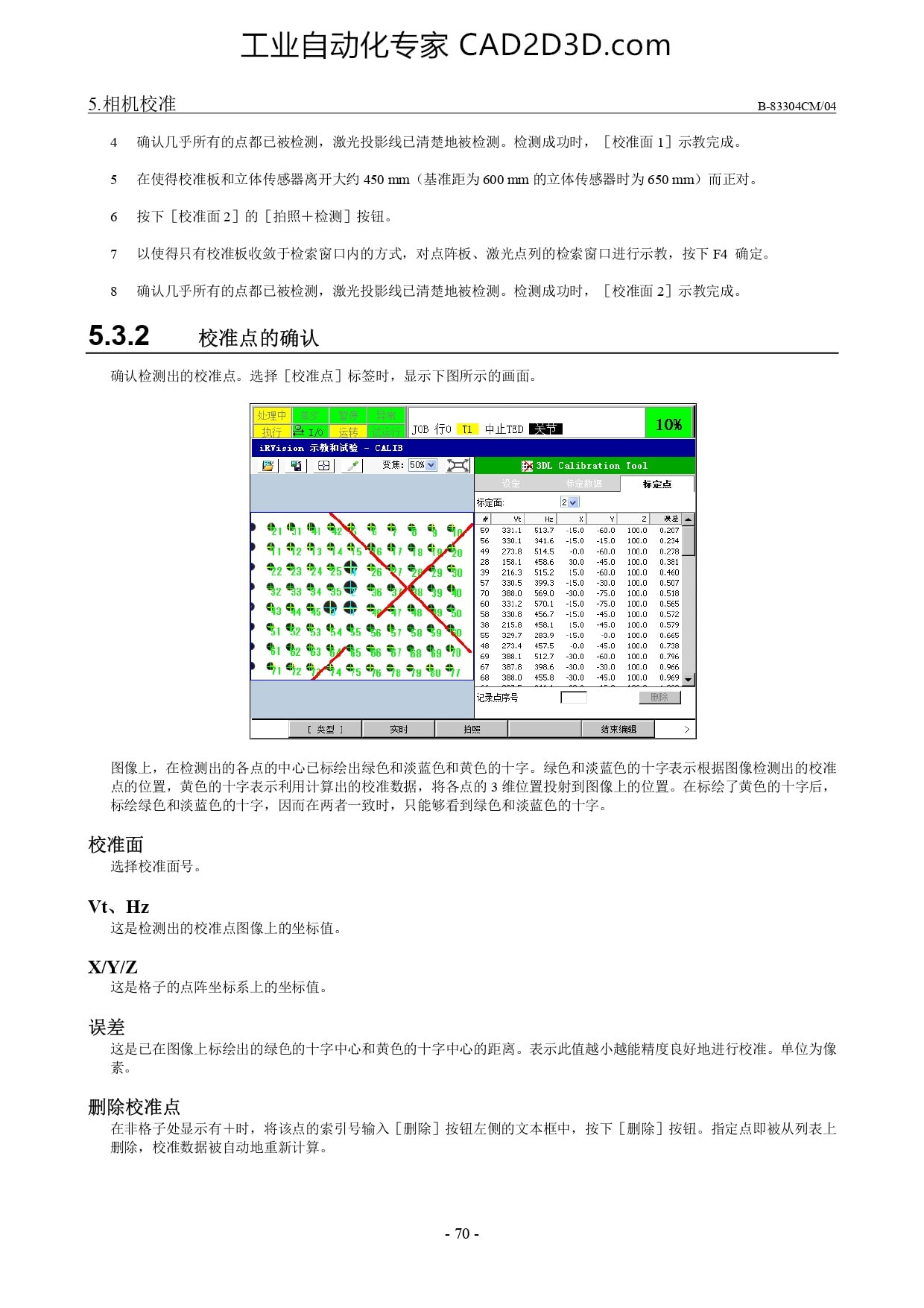
确认 检测 出 的 校准 点 。 选 择 【 校 准点] 标签 时 , 显 示 下 图 所 示 的 画面 。
|| 0B 470 TL 中止 Tzp
B | 田 | ”| 有: Eu zl |
T 人 加 |
W ww El TY RE
8% B 8NY B B § & g B ser 0 s o 0207
28R 00 99 和
32 93 94 5 By 9@y [ 型 3 s 50 w0 oo owe
92,9, 9.@ e ep e 0 |5 55 55 wn o oo oms
69e a8 1 ae | D5 Rer 150 w0 oo non
BN % 0 G 0 9 Qg % smr mes 130 50 100 b
AR T R L IR TR PR DN e 人 i ov s
© me wme w0 wo 1o 0w
|
记录 点 序号 B
[ 类 型 ] 58 A 结束 编辑 >
图 像 上 , 在 检测 出 的 各 点 的 中 心 已 标 绘 出 绿色 和 淡 蓝 色 和 黄色 的 十 字
点 的 位 置 , 黄 色 的 十 字 表示 利用 计算 出 的 校准 数据 , 将 各 ,
标 绘 绿 色 和 淡 蓝 色 的 十 字 , 因 而 在 两 者 一 致 时 , 只 能 够 看
。 绿 色 和 淡 蓝 色 的 十 字 表 示 根 据 图 像 检测
3 维 位 置 投 旬 像 上 的 位 置 。 在 标 绘 了 黄色 的
色 和 淡 蓝 色 的 十 字 。
校准 面
选择 校准 面 号 。
Vt、Hz
这 是 检测 出 的 校准 点 图 像 上 的 坐标 值 。
XI/Y/Z
这 是 格子 的 点 阵 坐 标 系 上 的 坐标 值 。
误差
这 是 已 在 图 像 上 标 绘 出 的 绿色 的 十 字 中 心 和 黄色 的 十 字 中 心 的 距离 。 表 示 此 值 越 小 越 能 精度 良好 地 进行 校准 。 单 位 为 像
删除 校准 点
在 非 格子 处 显示 有 十 时 , 将 该 点 的 索引 号 输入 [删除 ] 按钮 左 侧 的 文本 框 中 , 按 下 [删除 ] 按钮 。 指 定点 即 被 从 列表 上
删除 , 校 准 数据 被 自动 地 重新 计算 。
-70-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)