视觉跟踪校准
工业 自动 化 专家 CAD2D3D.com
B-§3304CM/04 5. 相 机 校准
自动 再 校准 不 会 进行 夹具 设置 情报 的 再 设 定 。 将 点 阵 板 牢 牢 固定 于 最 初 校准 的 位 置 , 请 勿 进行 移动 。
已 将 点 阵 板 安装 到 机 器 人 的 机 械 手 上 时 , 请 勿 改写 存储 有 夹具 设置 情报 的 工具 坐标 系 的 值 。 进 行 再 校准 时 , 在
根据 机 器 人 的 位 置 计 算 校 准 夹具 的 位 置 时 要 参照 工具 坐标 系 的 值 。
5.4 视觉 跟踪 校准
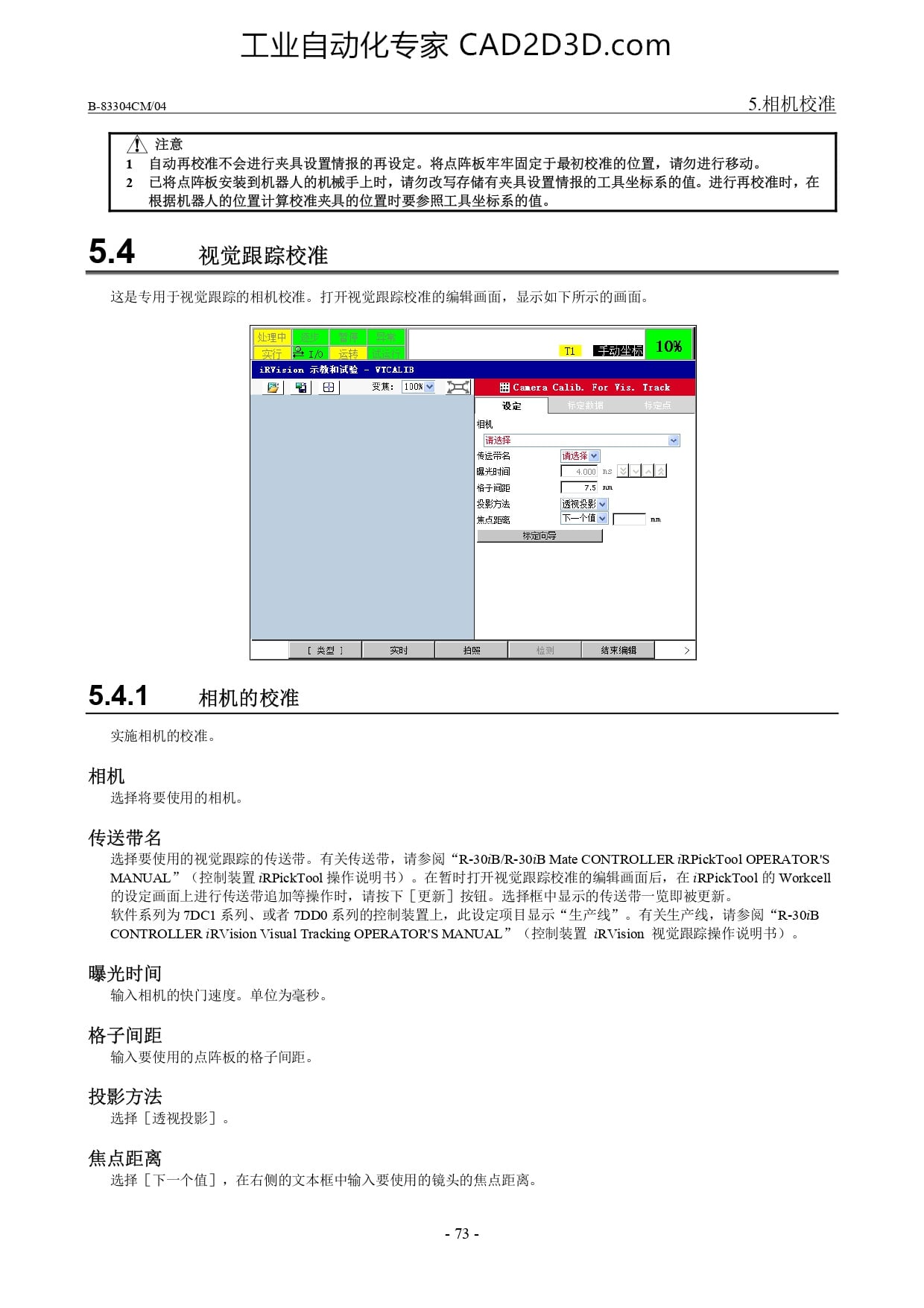
这 是 专用 于 视觉 跟踪 的 相机 校准 。 打 开 视 觉 跟 踪 校准 的 编辑 画面 , 显 示 如 下 所 示 的 画面 。
[类 型 1 3 8 5 结束 编辑 >
5.4.1 相机 的 校准
实施 相机 的 校准 。
相机
选择 将 要 使 用 的 相机 。
传送 带 名
选择 要 使 用 的 视觉 跟踪 的 传送 带 。 有 关 传 送 带 , 请 参阅 “R-30 训 及-30iB Mate CONTROLLER 训 PickTool OPERATOR'S
MANUAL ”控制 装置 退 PickTool 操作 说 明 书 ) 。 在 暂时 打开 视觉 跟踪 校准 的 编辑
的 设 定 画面 上 进行 传送 带 追加 等 操作 时 , 请 按 下 [更 新 ] 按钮 。 选 择 框 < d
BAFRFIH TDCI 5. B TDDO RIUMHEHIRE b, SBSETE SR PR o AL
CONTROLLER iRVision Visual Tracking OPERATOR'S MANUAL” (控制 装置 总 Vision 视觉 虽
曝光 时 间
输入 相机 的 快门 速度 。 单 位 为 毫秒 。
格子 间距
输入 要 使 用 的 点 阵 板 的 格子 间距 。
投影 方法
选择 【透视 投影 ] 。
焦点 距离
选择 [下 一 个 值 ] , 在 右 侧 的 文本 框 中 输入 要 使 用 的 镜头 的 焦点 距离
请 参阅 “R-30IB
操作 说 明 书 ) 。
-73 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)