进行试验
工业 自动 化 专家 CAD2D3D.com
和 .视觉 程序 B-83304CM/04
认 计算 出 的 补 1
确认 的 条 件 ,
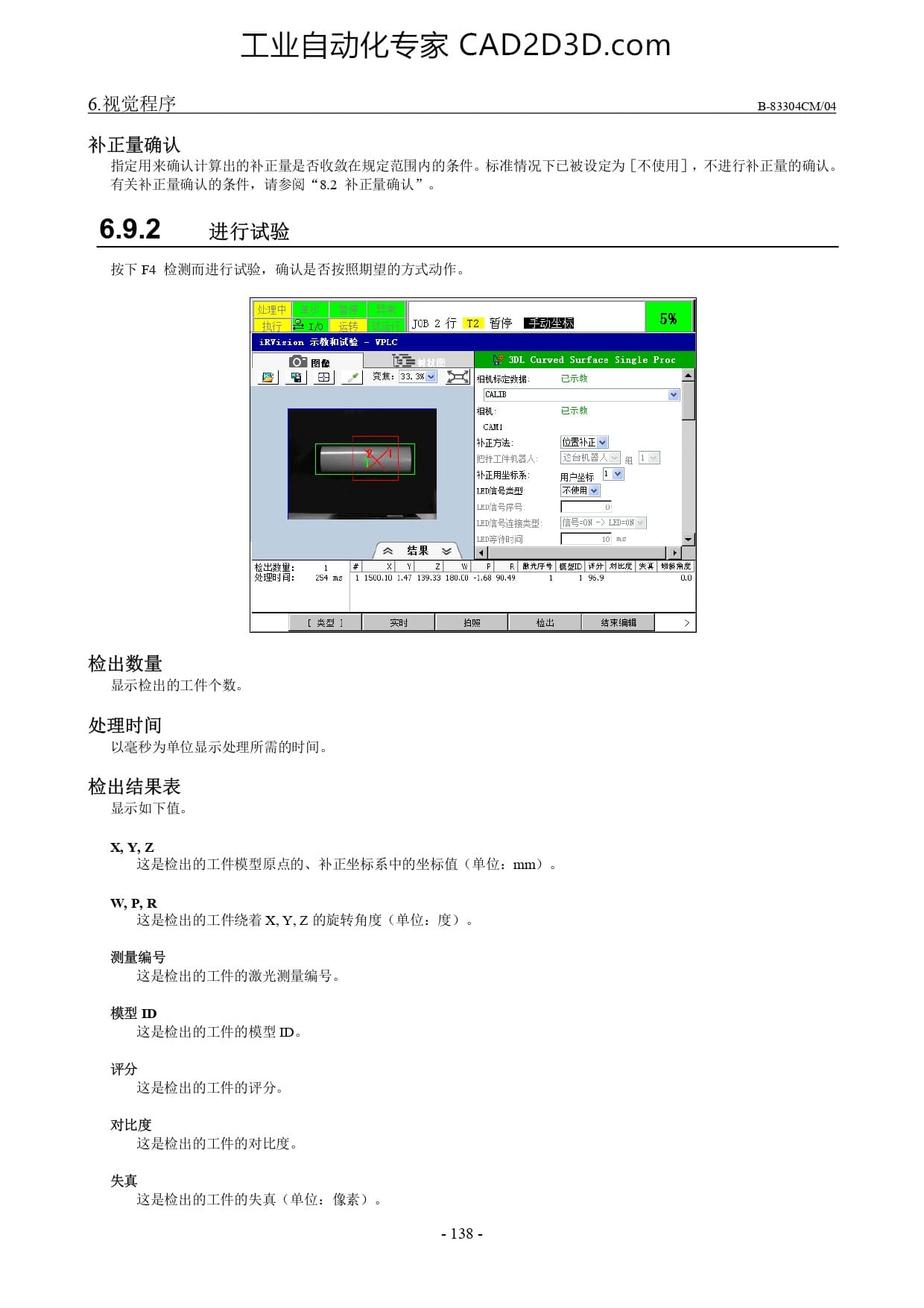
6.9.2 进行 试验
按 下 F4 检测
内 的 条 件 。 标准 情 况 下 已 被 设 定 为 [不 使 用 ], 不 进行 补正 量 的 确认 。
期 望 的 方式 动作 。
, 确 认 是 否
105 > 行 WA
ESFRIR
B| 下 | 田 | | =
祖 机 标定 部 所: 已 示 朝
o ==
相机
ca
1hEF 法
把 持 工件 机 器 人
[~ #R v\
可
FEmE: 1 | 可 W 7T B BED W57 | KR HERE
处 理 时 间 : 254 ms | 1 1500,10 1,47 139,33 180,C0 -1,.68 90,49 ¥ 19%.9 0o
[ 类 型 1 实时 拍照 ! 革 束 编辑 >
检 出 数量
显示 检 出 的 工件 个 数 。
处 理 时 间
以 毫秒 为 单位 显示 处 理 所 需 的 时 间 。
的 、 补 正 坐 标 系 中 的 坐标 值 单位: mm) 。
这 是 检 出 的 工件 绕 着 X, Y, Z 的 旋转 角度 〈 单 位 : 度 ) 。
这 是 检 出 的 工件 的 激光 测量 编号 。
这 是 检 出 的 工件 的 模型 ID。
这 是 检 出 的 工件 的 评分 。
这 是 检 出 的 工件 的 对 比 度 。
这 是 检 出 的 工件 的 失真 〈 单 位 :像素
-138 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)